Dongjin Kim, Chan Jin Park, Je-Sung Koh, Jonghyun Ha
{"title":"Small-scale robots inspired by aquatic interfacial biolocomotion","authors":"Dongjin Kim, Chan Jin Park, Je-Sung Koh, Jonghyun Ha","doi":"10.1557/s43577-023-00646-w","DOIUrl":null,"url":null,"abstract":"<p>Bioinspired semiaquatic robots have a remarkable ability to effectively navigate on the water surface. In this article, we explore the design of these biomimetic robotic systems and their body scale-dependent governing forces behind the motion. First, the role of surface tension in enabling hydrophobic objects to remain afloat despite having greater density than water and the effect of morphology, especially the presence of hair-like structures, on the flotation stability are discussed. Then the forces that drive the diverse motions of natural organisms and robots on the air/water interface are investigated. We highlight that while small organisms and robots generate motion utilizing surface tension-based force, large ones primarily exploit inertial drag for propulsion. We show the correlation between the performance and body size in both small and large natural organisms, and how they adjust the shape and speed of legs to optimize the propulsion. To optimize these distinct propulsion forces, the shape and speed of the driving legs are adjusted, thereby maximizing momentum while maintaining high efficiency. This article aims to provide insights on the design and operating mechanism of semiaquatic robots and to bridge the gap between the study of biological locomotion and its mechanical analogs.</p><h3 data-test=\"abstract-sub-heading\">Graphical Abstract</h3>\n","PeriodicalId":18828,"journal":{"name":"Mrs Bulletin","volume":"74 1","pages":""},"PeriodicalIF":4.9000,"publicationDate":"2024-01-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Mrs Bulletin","FirstCategoryId":"88","ListUrlMain":"https://doi.org/10.1557/s43577-023-00646-w","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
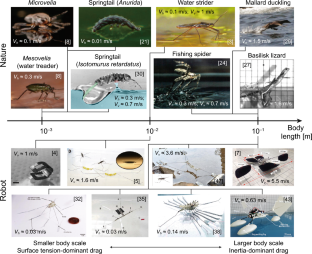
Bioinspired semiaquatic robots have a remarkable ability to effectively navigate on the water surface. In this article, we explore the design of these biomimetic robotic systems and their body scale-dependent governing forces behind the motion. First, the role of surface tension in enabling hydrophobic objects to remain afloat despite having greater density than water and the effect of morphology, especially the presence of hair-like structures, on the flotation stability are discussed. Then the forces that drive the diverse motions of natural organisms and robots on the air/water interface are investigated. We highlight that while small organisms and robots generate motion utilizing surface tension-based force, large ones primarily exploit inertial drag for propulsion. We show the correlation between the performance and body size in both small and large natural organisms, and how they adjust the shape and speed of legs to optimize the propulsion. To optimize these distinct propulsion forces, the shape and speed of the driving legs are adjusted, thereby maximizing momentum while maintaining high efficiency. This article aims to provide insights on the design and operating mechanism of semiaquatic robots and to bridge the gap between the study of biological locomotion and its mechanical analogs.
期刊介绍:
MRS Bulletin is one of the most widely recognized and highly respected publications in advanced materials research. Each month, the Bulletin provides a comprehensive overview of a specific materials theme, along with industry and policy developments, and MRS and materials-community news and events. Written by leading experts, the overview articles are useful references for specialists, but are also presented at a level understandable to a broad scientific audience.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
