Xinyong Liu, Jian Ou, Dehai Yan, Yong Zhang, Guohong Deng
{"title":"Path tracking control of automated vehicles based on adaptive MPC in variable scenarios","authors":"Xinyong Liu, Jian Ou, Dehai Yan, Yong Zhang, Guohong Deng","doi":"10.1049/itr2.12484","DOIUrl":null,"url":null,"abstract":"<p>For complex and dynamic high-speed driving scenarios, an adaptive model predictive control (MPC) controller is designed to ensure effective path tracking for automated vehicles. Firstly, in order to prevent model mismatch in the MPC controller, a tire cornering stiffness estimation algorithm is designed and a soft constraint on slip angle is added to further enhance the controller's precision in tracking trajectories and the vehicle's driving stability. Secondly, the improved particle swarm optimization (IPSO) method with dynamic weights and penalty functions is suggested to address the issue of insufficient accuracy in solving quadratic programming. Additionally, the standard particle swarm optimization (PSO) algorithm is used to seek the most suitable time horizon parameters offline to obtain the best time horizon data set under different vehicle speeds and adhesion coefficients, and then it is optimized online by an adaptive network-based fuzzy inference system (ANFIS) to enhance the model predictive controller's adaptability in different operating conditions. Finally, simulation experiments are conducted under three different operating conditions: docked roads, split roads, and variable vehicle speeds. The results indicate that the designed adaptive MPC controller can accurately and stably track the reference trajectory in various scenarios.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 6","pages":"1031-1044"},"PeriodicalIF":2.5000,"publicationDate":"2024-01-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12484","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12484","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
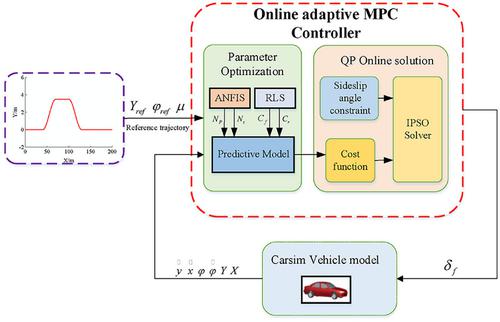
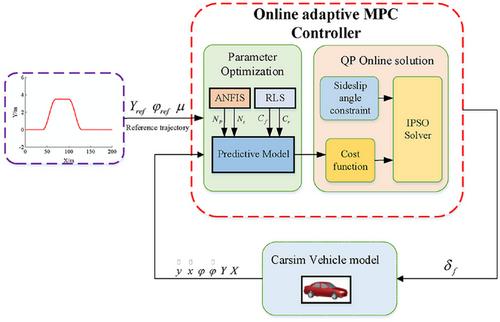
For complex and dynamic high-speed driving scenarios, an adaptive model predictive control (MPC) controller is designed to ensure effective path tracking for automated vehicles. Firstly, in order to prevent model mismatch in the MPC controller, a tire cornering stiffness estimation algorithm is designed and a soft constraint on slip angle is added to further enhance the controller's precision in tracking trajectories and the vehicle's driving stability. Secondly, the improved particle swarm optimization (IPSO) method with dynamic weights and penalty functions is suggested to address the issue of insufficient accuracy in solving quadratic programming. Additionally, the standard particle swarm optimization (PSO) algorithm is used to seek the most suitable time horizon parameters offline to obtain the best time horizon data set under different vehicle speeds and adhesion coefficients, and then it is optimized online by an adaptive network-based fuzzy inference system (ANFIS) to enhance the model predictive controller's adaptability in different operating conditions. Finally, simulation experiments are conducted under three different operating conditions: docked roads, split roads, and variable vehicle speeds. The results indicate that the designed adaptive MPC controller can accurately and stably track the reference trajectory in various scenarios.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
