Jinwoo Lee, Kangkyu Kwon, Ira Soltis, Jared Matthews, Yoon Jae Lee, Hojoong Kim, Lissette Romero, Nathan Zavanelli, Youngjin Kwon, Shinjae Kwon, Jimin Lee, Yewon Na, Sung Hoon Lee, Ki Jun Yu, Minoru Shinohara, Frank L. Hammond, Woon-Hong Yeo
{"title":"Intelligent upper-limb exoskeleton integrated with soft bioelectronics and deep learning for intention-driven augmentation","authors":"Jinwoo Lee, Kangkyu Kwon, Ira Soltis, Jared Matthews, Yoon Jae Lee, Hojoong Kim, Lissette Romero, Nathan Zavanelli, Youngjin Kwon, Shinjae Kwon, Jimin Lee, Yewon Na, Sung Hoon Lee, Ki Jun Yu, Minoru Shinohara, Frank L. Hammond, Woon-Hong Yeo","doi":"10.1038/s41528-024-00297-0","DOIUrl":null,"url":null,"abstract":"The age and stroke-associated decline in musculoskeletal strength degrades the ability to perform daily human tasks using the upper extremities. Here, we introduce an intelligent upper-limb exoskeleton system that utilizes deep learning to predict human intention for strength augmentation. The embedded soft wearable sensors provide sensory feedback by collecting real-time muscle activities, which are simultaneously computed to determine the user’s intended movement. Cloud-based deep learning predicts four upper-limb joint motions with an average accuracy of 96.2% at a 500–550 ms response rate, suggesting that the exoskeleton operates just by human intention. In addition, an array of soft pneumatics assists the intended movements by providing 897 newtons of force while generating a displacement of 87 mm at maximum. The intent-driven exoskeleton can reduce human muscle activities by 3.7 times on average compared to the unassisted exoskeleton.","PeriodicalId":48528,"journal":{"name":"npj Flexible Electronics","volume":" ","pages":"1-13"},"PeriodicalIF":15.5000,"publicationDate":"2024-02-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s41528-024-00297-0.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"npj Flexible Electronics","FirstCategoryId":"88","ListUrlMain":"https://www.nature.com/articles/s41528-024-00297-0","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
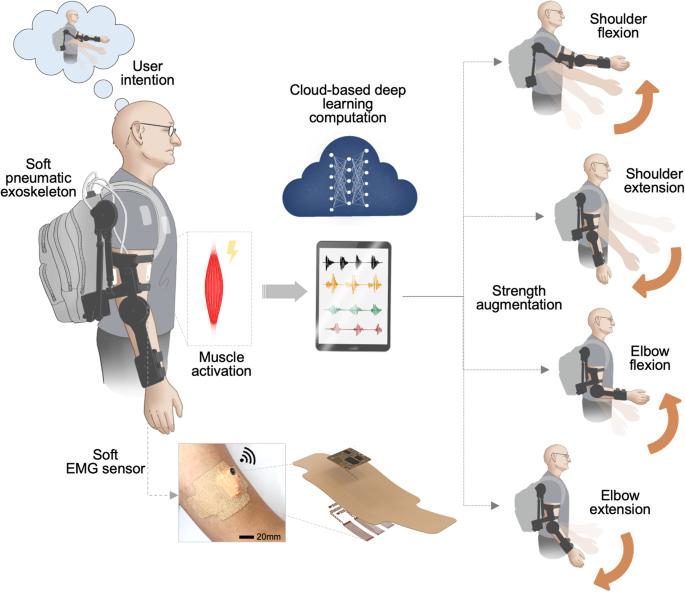
The age and stroke-associated decline in musculoskeletal strength degrades the ability to perform daily human tasks using the upper extremities. Here, we introduce an intelligent upper-limb exoskeleton system that utilizes deep learning to predict human intention for strength augmentation. The embedded soft wearable sensors provide sensory feedback by collecting real-time muscle activities, which are simultaneously computed to determine the user’s intended movement. Cloud-based deep learning predicts four upper-limb joint motions with an average accuracy of 96.2% at a 500–550 ms response rate, suggesting that the exoskeleton operates just by human intention. In addition, an array of soft pneumatics assists the intended movements by providing 897 newtons of force while generating a displacement of 87 mm at maximum. The intent-driven exoskeleton can reduce human muscle activities by 3.7 times on average compared to the unassisted exoskeleton.
期刊介绍:
npj Flexible Electronics is an online-only and open access journal, which publishes high-quality papers related to flexible electronic systems, including plastic electronics and emerging materials, new device design and fabrication technologies, and applications.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
