{"title":"Materials for electronically controllable microactuators","authors":"Michael F. Reynolds, Marc Z. Miskin","doi":"10.1557/s43577-024-00665-1","DOIUrl":null,"url":null,"abstract":"<h3 data-test=\"abstract-sub-heading\">Abstract</h3><p>Electronically controllable actuators have shrunk to remarkably small dimensions, thanks to recent advances in materials science. Currently, multiple classes of actuators can operate at the micron scale, be patterned using lithographic techniques, and be driven by complementary metal oxide semiconductor (CMOS)-compatible voltages, enabling new technologies, including digitally controlled micro-cilia, cell-sized origami structures, and autonomous microrobots controlled by onboard semiconductor electronics. This field is poised to grow, as many of these actuator technologies are the firsts of their kind and much of the underlying design space remains unexplored. To help map the current state of the art and set goals for the future, here, we overview existing work and examine how key figures of merit for actuation at the microscale, including force output, response time, power consumption, efficiency, and durability are fundamentally intertwined. In doing so, we find performance limits and tradeoffs for different classes of microactuators based on the coupling mechanism between electrical energy, chemical energy, and mechanical work. These limits both point to future goals for actuator development and signal promising applications for these actuators in sophisticated electronically integrated microrobotic systems.</p><h3 data-test=\"abstract-sub-heading\">Graphical Abstract</h3>\n","PeriodicalId":18828,"journal":{"name":"Mrs Bulletin","volume":"1 1","pages":""},"PeriodicalIF":4.9000,"publicationDate":"2024-02-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Mrs Bulletin","FirstCategoryId":"88","ListUrlMain":"https://doi.org/10.1557/s43577-024-00665-1","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
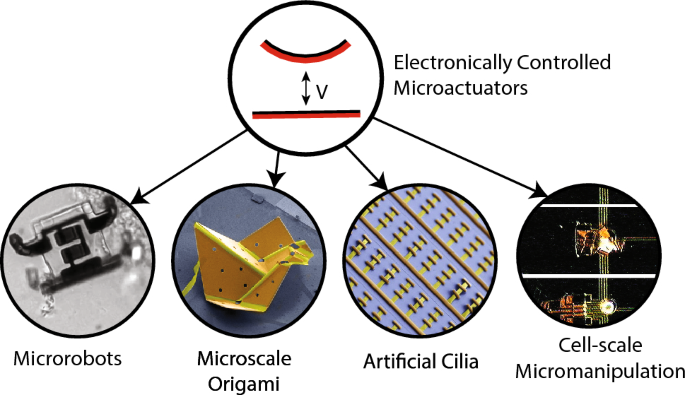
Electronically controllable actuators have shrunk to remarkably small dimensions, thanks to recent advances in materials science. Currently, multiple classes of actuators can operate at the micron scale, be patterned using lithographic techniques, and be driven by complementary metal oxide semiconductor (CMOS)-compatible voltages, enabling new technologies, including digitally controlled micro-cilia, cell-sized origami structures, and autonomous microrobots controlled by onboard semiconductor electronics. This field is poised to grow, as many of these actuator technologies are the firsts of their kind and much of the underlying design space remains unexplored. To help map the current state of the art and set goals for the future, here, we overview existing work and examine how key figures of merit for actuation at the microscale, including force output, response time, power consumption, efficiency, and durability are fundamentally intertwined. In doing so, we find performance limits and tradeoffs for different classes of microactuators based on the coupling mechanism between electrical energy, chemical energy, and mechanical work. These limits both point to future goals for actuator development and signal promising applications for these actuators in sophisticated electronically integrated microrobotic systems.
期刊介绍:
MRS Bulletin is one of the most widely recognized and highly respected publications in advanced materials research. Each month, the Bulletin provides a comprehensive overview of a specific materials theme, along with industry and policy developments, and MRS and materials-community news and events. Written by leading experts, the overview articles are useful references for specialists, but are also presented at a level understandable to a broad scientific audience.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
