{"title":"Applying the intrinsic principle of cell collectives to program robot swarms","authors":"","doi":"10.1016/j.xcrp.2024.102122","DOIUrl":null,"url":null,"abstract":"<p>Many control algorithms for formation of robot swarms are often inspired by animal swarms. However, these algorithms require robots having sensing and computational capabilities and are not applicable to robot swarms working in extreme environments, such as at micro/nanoscale and in space. Here, we directly apply the differential adhesion hypothesis (DAH) of cell biology to the formation of robot swarms. Like cell collectives, swarms of sensor-less robots aggregate and sort in a self-organized manner. We quantitatively investigate the DAH principle in both swarms of cells and robots. We find that the sorting time is nonlinearly related to the levels of adhesion differences. This sheds light on the mechanisms of timing control in morphogenesis. Based on these findings, we program robot swarms to form functional morphologies by tuning their adhesion. This work advances swarm robotics in forming functional morphologies in a self-organized manner and enables us to investigate morphogenesis in cell collectives using robot swarms.</p>","PeriodicalId":9703,"journal":{"name":"Cell Reports Physical Science","volume":"5 1","pages":""},"PeriodicalIF":7.3000,"publicationDate":"2024-07-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cell Reports Physical Science","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1016/j.xcrp.2024.102122","RegionNum":2,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
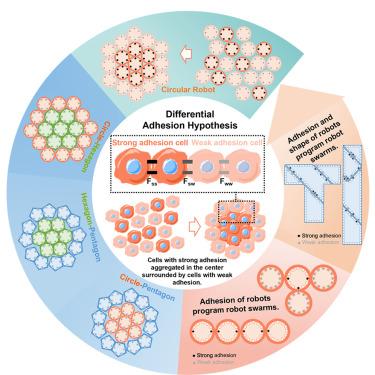
Many control algorithms for formation of robot swarms are often inspired by animal swarms. However, these algorithms require robots having sensing and computational capabilities and are not applicable to robot swarms working in extreme environments, such as at micro/nanoscale and in space. Here, we directly apply the differential adhesion hypothesis (DAH) of cell biology to the formation of robot swarms. Like cell collectives, swarms of sensor-less robots aggregate and sort in a self-organized manner. We quantitatively investigate the DAH principle in both swarms of cells and robots. We find that the sorting time is nonlinearly related to the levels of adhesion differences. This sheds light on the mechanisms of timing control in morphogenesis. Based on these findings, we program robot swarms to form functional morphologies by tuning their adhesion. This work advances swarm robotics in forming functional morphologies in a self-organized manner and enables us to investigate morphogenesis in cell collectives using robot swarms.
期刊介绍:
Cell Reports Physical Science, a premium open-access journal from Cell Press, features high-quality, cutting-edge research spanning the physical sciences. It serves as an open forum fostering collaboration among physical scientists while championing open science principles. Published works must signify significant advancements in fundamental insight or technological applications within fields such as chemistry, physics, materials science, energy science, engineering, and related interdisciplinary studies. In addition to longer articles, the journal considers impactful short-form reports and short reviews covering recent literature in emerging fields. Continually adapting to the evolving open science landscape, the journal reviews its policies to align with community consensus and best practices.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
