Serdar Coskun , Ozan Yazar , Fengqi Zhang , Lin Li , Cong Huang , Hamid Reza Karimi
{"title":"A multi-objective hierarchical deep reinforcement learning algorithm for connected and automated HEVs energy management","authors":"Serdar Coskun , Ozan Yazar , Fengqi Zhang , Lin Li , Cong Huang , Hamid Reza Karimi","doi":"10.1016/j.conengprac.2024.106104","DOIUrl":null,"url":null,"abstract":"<div><div>Connected and autonomous vehicles have offered unprecedented opportunities to improve fuel economy and reduce emissions of hybrid electric vehicle (HEV) in vehicular platoons. In this context, a hierarchical control strategy is put forward for connected HEVs. Firstly, we consider a deep deterministic policy gradient (DDPG) algorithm to compute the optimized vehicle speed using a trained optimal policy via vehicle-to-vehicle communication in the upper level. A multi-objective reward function is introduced, integrating vehicle fuel consumption, battery state-of-the-charge, emissions, and vehicle car-following objectives. Secondly, an adaptive equivalent consumption minimization strategy is devised to implement vehicle-level torque allocation in the platoon. Two drive cycles, HWFET and human-in-the-loop simulator driving cycles are utilized for realistic testing of the considered platoon energy management. It is shown that DDPG runs the engine more efficiently than the widely-implemented Q-learning and deep Q-network, thus showing enhanced fuel savings. Further, the contribution of this paper is to speed up the higher-level vehicular control application of deep learning algorithms in the connected and automated HEV platoon energy management applications.</div></div>","PeriodicalId":50615,"journal":{"name":"Control Engineering Practice","volume":"153 ","pages":"Article 106104"},"PeriodicalIF":4.6000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Control Engineering Practice","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0967066124002636","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/25 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
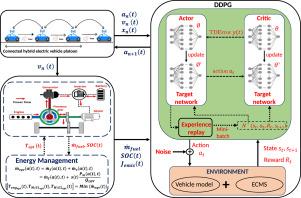
Connected and autonomous vehicles have offered unprecedented opportunities to improve fuel economy and reduce emissions of hybrid electric vehicle (HEV) in vehicular platoons. In this context, a hierarchical control strategy is put forward for connected HEVs. Firstly, we consider a deep deterministic policy gradient (DDPG) algorithm to compute the optimized vehicle speed using a trained optimal policy via vehicle-to-vehicle communication in the upper level. A multi-objective reward function is introduced, integrating vehicle fuel consumption, battery state-of-the-charge, emissions, and vehicle car-following objectives. Secondly, an adaptive equivalent consumption minimization strategy is devised to implement vehicle-level torque allocation in the platoon. Two drive cycles, HWFET and human-in-the-loop simulator driving cycles are utilized for realistic testing of the considered platoon energy management. It is shown that DDPG runs the engine more efficiently than the widely-implemented Q-learning and deep Q-network, thus showing enhanced fuel savings. Further, the contribution of this paper is to speed up the higher-level vehicular control application of deep learning algorithms in the connected and automated HEV platoon energy management applications.
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
