MaryAnn C Wertan, Serge Sicouri, Yoshiyuki Yamashita, Massimo Baudo, Trisha A Senss, Danielle Spragan, Gianluca Torregrossa, Francis P Sutter
{"title":"Step-by-step technique of robotic-assisted minimally invasive direct coronary artery bypass.","authors":"MaryAnn C Wertan, Serge Sicouri, Yoshiyuki Yamashita, Massimo Baudo, Trisha A Senss, Danielle Spragan, Gianluca Torregrossa, Francis P Sutter","doi":"10.21037/acs-2024-rcabg-0034","DOIUrl":null,"url":null,"abstract":"<p><p>Coronary artery bypass grafting (CABG) is the treatment of choice for coronary artery disease. The traditional method of performing CABG via a full sternotomy has its drawbacks, including increased postoperative morbidity, a higher incidence of complications, and extended hospitalizations. Although minimally invasive and robotic-assisted technology offer promising alternatives, they have not gained wide acceptance, largely because of the limited amount of literature supporting hybrid and robotic-assisted CABG. Since 2005, Lankenau Heart Institute's cardiothoracic surgical team has been developing and refining for selected patients a method for coronary revascularization that involves robotic harvesting of the left internal mammary artery (LIMA) and beating heart surgery through a limited minithoracotomy. This technique precisely places the robotic endoscopic port over the target site of the left anterior descending (LAD) artery. The LIMA is harvested using the enhanced visualization and precision of the robotic platform. The robotic instruments are then removed, and the endoscopic port site is slightly enlarged to become the minithoracotomy, allowing for LIMA-to-LAD anastomosis. The other two robotic ports are used for drains, eliminating the need for additional incisions. The method has been used in over 2,850 patients. The method has been used in over 2,850 patients. This article describes in detail our standardized technique for robotic-assisted minimally invasive direct coronary artery bypass (R-MIDCAB).</p>","PeriodicalId":8067,"journal":{"name":"Annals of cardiothoracic surgery","volume":"13 5","pages":"442-451"},"PeriodicalIF":3.1000,"publicationDate":"2024-09-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11491183/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Annals of cardiothoracic surgery","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.21037/acs-2024-rcabg-0034","RegionNum":2,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/24 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"CARDIAC & CARDIOVASCULAR SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
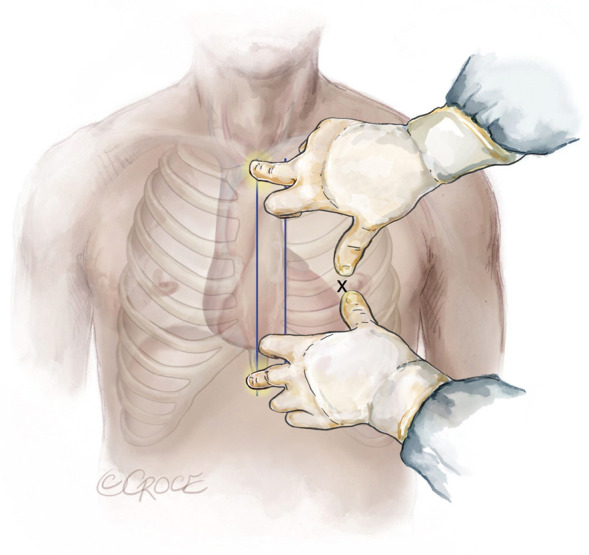
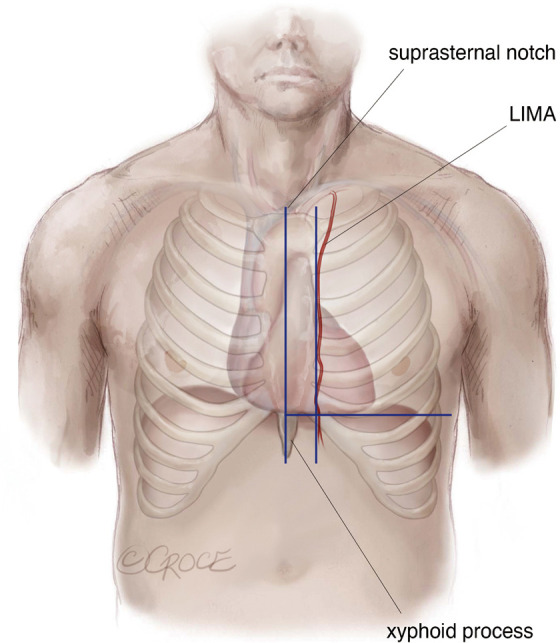
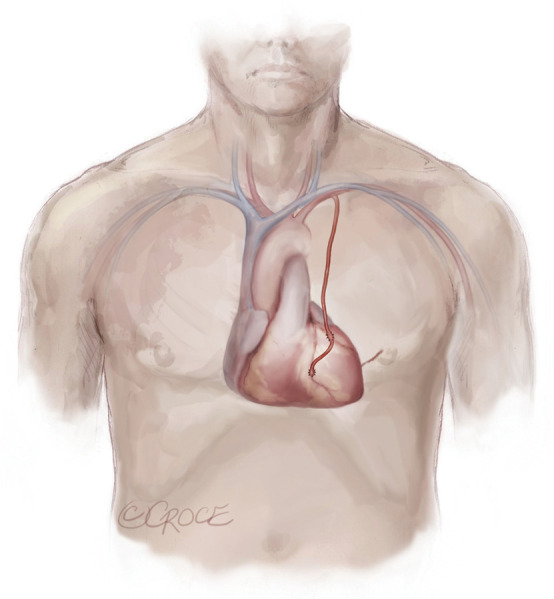
Coronary artery bypass grafting (CABG) is the treatment of choice for coronary artery disease. The traditional method of performing CABG via a full sternotomy has its drawbacks, including increased postoperative morbidity, a higher incidence of complications, and extended hospitalizations. Although minimally invasive and robotic-assisted technology offer promising alternatives, they have not gained wide acceptance, largely because of the limited amount of literature supporting hybrid and robotic-assisted CABG. Since 2005, Lankenau Heart Institute's cardiothoracic surgical team has been developing and refining for selected patients a method for coronary revascularization that involves robotic harvesting of the left internal mammary artery (LIMA) and beating heart surgery through a limited minithoracotomy. This technique precisely places the robotic endoscopic port over the target site of the left anterior descending (LAD) artery. The LIMA is harvested using the enhanced visualization and precision of the robotic platform. The robotic instruments are then removed, and the endoscopic port site is slightly enlarged to become the minithoracotomy, allowing for LIMA-to-LAD anastomosis. The other two robotic ports are used for drains, eliminating the need for additional incisions. The method has been used in over 2,850 patients. The method has been used in over 2,850 patients. This article describes in detail our standardized technique for robotic-assisted minimally invasive direct coronary artery bypass (R-MIDCAB).




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
