Daniil Kirilenko , Anton Andreychuk , Aleksandr I. Panov , Konstantin Yakovlev
{"title":"Generative models for grid-based and image-based pathfinding","authors":"Daniil Kirilenko , Anton Andreychuk , Aleksandr I. Panov , Konstantin Yakovlev","doi":"10.1016/j.artint.2024.104238","DOIUrl":null,"url":null,"abstract":"<div><div>Pathfinding is a challenging problem which generally asks to find a sequence of valid moves for an agent provided with a representation of the environment, i.e. a map, in which it operates. In this work, we consider pathfinding on binary grids and on image representations of the digital elevation models. In the former case, the transition costs are known, while in latter scenario, they are not. A widespread method to solve the first problem is to utilize a search algorithm that systematically explores the search space to obtain a solution. Ideally, the search should also be complemented with an informative heuristic to focus on the goal and prune the unpromising regions of the search space, thus decreasing the number of search iterations. Unfortunately, the widespread heuristic functions for grid-based pathfinding, such as Manhattan distance or Chebyshev distance, do not take the obstacles into account and in obstacle-rich environments demonstrate inefficient performance. As for pathfinding with image inputs, the heuristic search cannot be applied straightforwardly as the transition costs, i.e. the costs of moving from one pixel to the other, are not known. To tackle both challenges, we suggest utilizing modern deep neural networks to infer the instance-dependent heuristic functions at the pre-processing step and further use them for pathfinding with standard heuristic search algorithms. The principal heuristic function that we suggest learning is the path probability, which indicates how likely the grid cell (pixel) is lying on the shortest path (for binary grids with known transition costs, we also suggest another variant of the heuristic function that can speed up the search). Learning is performed in a supervised fashion (while we have also explored the possibilities of end-to-end learning that includes a planner in the learning pipeline). At the test time, path probability is used as the secondary heuristic for the Focal Search, a specific heuristic search algorithm that provides the theoretical guarantees on the cost bound of the resultant solution. Empirically, we show that the suggested approach significantly outperforms state-of-the-art competitors in a variety of different tasks (including out-of-the distribution instances).</div></div>","PeriodicalId":8434,"journal":{"name":"Artificial Intelligence","volume":"338 ","pages":"Article 104238"},"PeriodicalIF":4.6000,"publicationDate":"2024-11-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Artificial Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0004370224001747","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
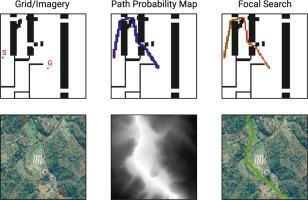
Pathfinding is a challenging problem which generally asks to find a sequence of valid moves for an agent provided with a representation of the environment, i.e. a map, in which it operates. In this work, we consider pathfinding on binary grids and on image representations of the digital elevation models. In the former case, the transition costs are known, while in latter scenario, they are not. A widespread method to solve the first problem is to utilize a search algorithm that systematically explores the search space to obtain a solution. Ideally, the search should also be complemented with an informative heuristic to focus on the goal and prune the unpromising regions of the search space, thus decreasing the number of search iterations. Unfortunately, the widespread heuristic functions for grid-based pathfinding, such as Manhattan distance or Chebyshev distance, do not take the obstacles into account and in obstacle-rich environments demonstrate inefficient performance. As for pathfinding with image inputs, the heuristic search cannot be applied straightforwardly as the transition costs, i.e. the costs of moving from one pixel to the other, are not known. To tackle both challenges, we suggest utilizing modern deep neural networks to infer the instance-dependent heuristic functions at the pre-processing step and further use them for pathfinding with standard heuristic search algorithms. The principal heuristic function that we suggest learning is the path probability, which indicates how likely the grid cell (pixel) is lying on the shortest path (for binary grids with known transition costs, we also suggest another variant of the heuristic function that can speed up the search). Learning is performed in a supervised fashion (while we have also explored the possibilities of end-to-end learning that includes a planner in the learning pipeline). At the test time, path probability is used as the secondary heuristic for the Focal Search, a specific heuristic search algorithm that provides the theoretical guarantees on the cost bound of the resultant solution. Empirically, we show that the suggested approach significantly outperforms state-of-the-art competitors in a variety of different tasks (including out-of-the distribution instances).
期刊介绍:
The Journal of Artificial Intelligence (AIJ) welcomes papers covering a broad spectrum of AI topics, including cognition, automated reasoning, computer vision, machine learning, and more. Papers should demonstrate advancements in AI and propose innovative approaches to AI problems. Additionally, the journal accepts papers describing AI applications, focusing on how new methods enhance performance rather than reiterating conventional approaches. In addition to regular papers, AIJ also accepts Research Notes, Research Field Reviews, Position Papers, Book Reviews, and summary papers on AI challenges and competitions.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
