Cyndia Cao , Deaho Moon , Colin Creager , Dennis K. Lieu , Hannah S. Stuart
{"title":"Push-pull locomotion: Increasing travel velocity in loose regolith via induced wheel slip","authors":"Cyndia Cao , Deaho Moon , Colin Creager , Dennis K. Lieu , Hannah S. Stuart","doi":"10.1016/j.jterra.2023.08.005","DOIUrl":null,"url":null,"abstract":"<div><p>Push–pull locomotion is an effective mobility mode for traversing loose lunar regolith and climbing sandy slopes. A rover with an active suspension can generate thrust from a set of anchored wheels by adjusting its wheelbase while driving the remaining wheels. This paper explores the relationship between the velocities of the rotational and translational suspension elements. Using a kinematic slip greater than 30%–40%, inchworming surpasses both the travel velocity and power efficiency of normal driving on slopes between 10°–20°. On a 20°slope, inchworming improves travel reduction from 98% to 85% and reduces normalized power consumption by a factor of eight. Experiments with NASA’s upcoming Volatiles Investigating Polar Exploration Rover show that increasing kinematic slip increases its travel velocity in a sink tank by 35%. Models using granular resistive force theory indicate that wheels driving at higher slip can generate greater tractive force and thus reduce the load on the anchored wheels. Otherwise, at lower driving slip, the load capacity of anchored wheels may be exceeded and result in oscillatory overall travel. These experiments suggest that there is further room to improve wheeled locomotion by intentionally inducing wheel slip, especially in articulated suspensions.</p></div>","PeriodicalId":50023,"journal":{"name":"Journal of Terramechanics","volume":"110 ","pages":"Pages 87-99"},"PeriodicalIF":3.7000,"publicationDate":"2023-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Terramechanics","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0022489823000708","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/9/2 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, ENVIRONMENTAL","Score":null,"Total":0}
引用次数: 0
Abstract
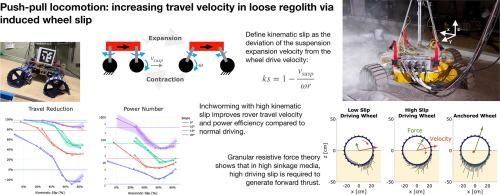
Push–pull locomotion is an effective mobility mode for traversing loose lunar regolith and climbing sandy slopes. A rover with an active suspension can generate thrust from a set of anchored wheels by adjusting its wheelbase while driving the remaining wheels. This paper explores the relationship between the velocities of the rotational and translational suspension elements. Using a kinematic slip greater than 30%–40%, inchworming surpasses both the travel velocity and power efficiency of normal driving on slopes between 10°–20°. On a 20°slope, inchworming improves travel reduction from 98% to 85% and reduces normalized power consumption by a factor of eight. Experiments with NASA’s upcoming Volatiles Investigating Polar Exploration Rover show that increasing kinematic slip increases its travel velocity in a sink tank by 35%. Models using granular resistive force theory indicate that wheels driving at higher slip can generate greater tractive force and thus reduce the load on the anchored wheels. Otherwise, at lower driving slip, the load capacity of anchored wheels may be exceeded and result in oscillatory overall travel. These experiments suggest that there is further room to improve wheeled locomotion by intentionally inducing wheel slip, especially in articulated suspensions.
期刊介绍:
The Journal of Terramechanics is primarily devoted to scientific articles concerned with research, design, and equipment utilization in the field of terramechanics.
The Journal of Terramechanics is the leading international journal serving the multidisciplinary global off-road vehicle and soil working machinery industries, and related user community, governmental agencies and universities.
The Journal of Terramechanics provides a forum for those involved in research, development, design, innovation, testing, application and utilization of off-road vehicles and soil working machinery, and their sub-systems and components. The Journal presents a cross-section of technical papers, reviews, comments and discussions, and serves as a medium for recording recent progress in the field.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
