Marcos Maroto-Gómez, Álvaro Castro-González, José Carlos Castillo, María Malfaz, Miguel Ángel Salichs
{"title":"An adaptive decision-making system supported on user preference predictions for human-robot interactive communication.","authors":"Marcos Maroto-Gómez, Álvaro Castro-González, José Carlos Castillo, María Malfaz, Miguel Ángel Salichs","doi":"10.1007/s11257-022-09321-2","DOIUrl":null,"url":null,"abstract":"<p><p>Adapting to dynamic environments is essential for artificial agents, especially those aiming to communicate with people interactively. In this context, a social robot that adapts its behaviour to different users and proactively suggests their favourite activities may produce a more successful interaction. In this work, we describe how the autonomous decision-making system embedded in our social robot Mini can produce a personalised interactive communication experience by considering the preferences of the user the robot interacts with. We compared the performance of Top Label as Class and Ranking by Pairwise Comparison, two promising algorithms in the area, to find the one that best predicts the user preferences. Although both algorithms provide robust results in preference prediction, we decided to integrate Ranking by Pairwise Comparison since it provides better estimations. The method proposed in this contribution allows the autonomous decision-making system of the robot to work on different modes, balancing activity exploration with the selection of the favourite entertaining activities. The operation of the preference learning system is shown in three real case studies where the decision-making system works differently depending on the user the robot is facing. Then, we conducted a human-robot interaction experiment to investigate whether the robot users perceive the personalised selection of activities more appropriate than selecting the activities at random. The results show how the study participants found the personalised activity selection more appropriate, improving their likeability towards the robot and how intelligent they perceive the system. query Please check the edit made in the article title.</p>","PeriodicalId":49388,"journal":{"name":"User Modeling and User-Adapted Interaction","volume":"33 2","pages":"359-403"},"PeriodicalIF":3.5000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8994572/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"User Modeling and User-Adapted Interaction","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11257-022-09321-2","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/4/9 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"COMPUTER SCIENCE, CYBERNETICS","Score":null,"Total":0}
引用次数: 0
Abstract
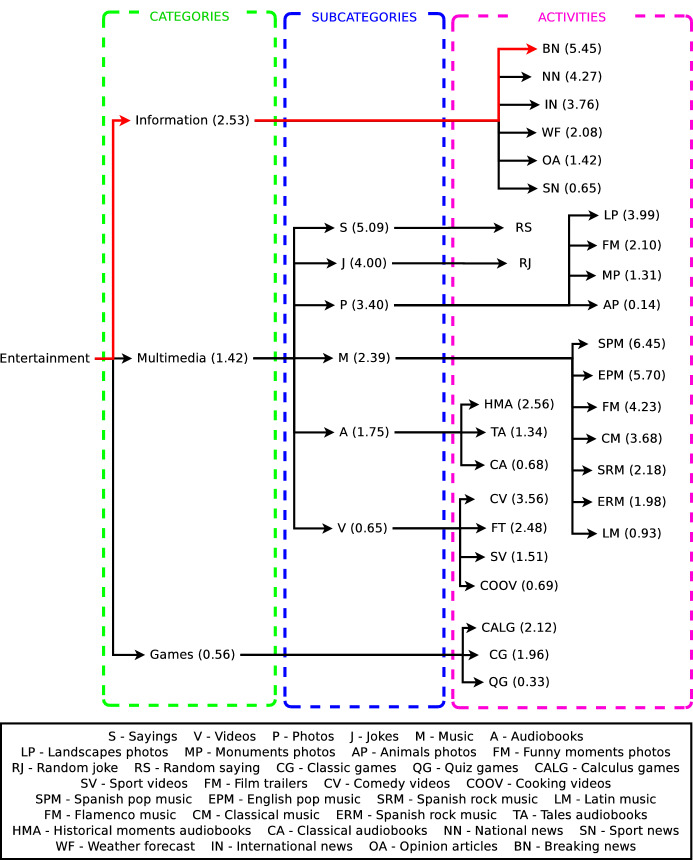
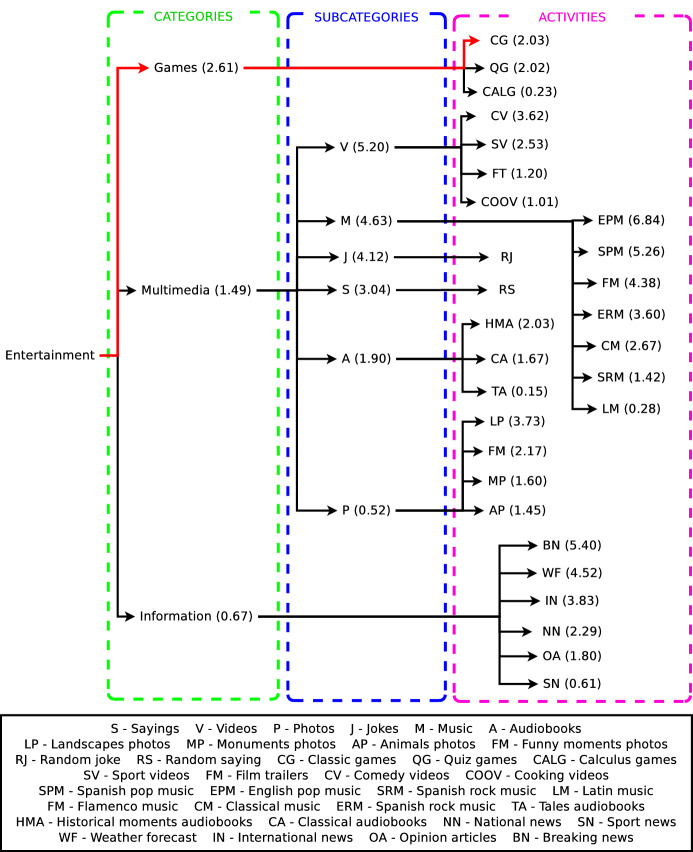
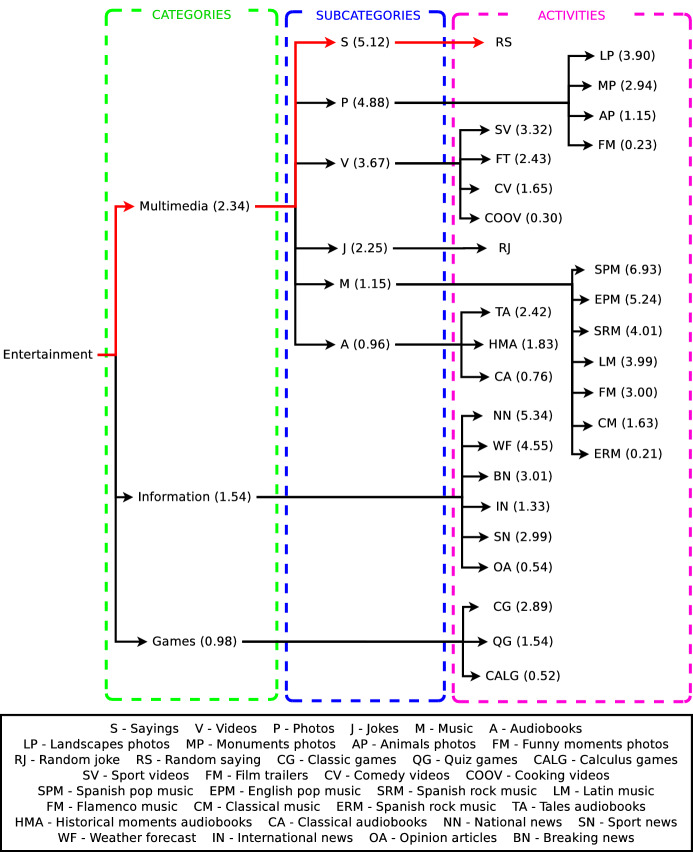
Adapting to dynamic environments is essential for artificial agents, especially those aiming to communicate with people interactively. In this context, a social robot that adapts its behaviour to different users and proactively suggests their favourite activities may produce a more successful interaction. In this work, we describe how the autonomous decision-making system embedded in our social robot Mini can produce a personalised interactive communication experience by considering the preferences of the user the robot interacts with. We compared the performance of Top Label as Class and Ranking by Pairwise Comparison, two promising algorithms in the area, to find the one that best predicts the user preferences. Although both algorithms provide robust results in preference prediction, we decided to integrate Ranking by Pairwise Comparison since it provides better estimations. The method proposed in this contribution allows the autonomous decision-making system of the robot to work on different modes, balancing activity exploration with the selection of the favourite entertaining activities. The operation of the preference learning system is shown in three real case studies where the decision-making system works differently depending on the user the robot is facing. Then, we conducted a human-robot interaction experiment to investigate whether the robot users perceive the personalised selection of activities more appropriate than selecting the activities at random. The results show how the study participants found the personalised activity selection more appropriate, improving their likeability towards the robot and how intelligent they perceive the system. query Please check the edit made in the article title.
期刊介绍:
User Modeling and User-Adapted Interaction provides an interdisciplinary forum for the dissemination of novel and significant original research results about interactive computer systems that can adapt themselves to their users, and on the design, use, and evaluation of user models for adaptation. The journal publishes high-quality original papers from, e.g., the following areas: acquisition and formal representation of user models; conceptual models and user stereotypes for personalization; student modeling and adaptive learning; models of groups of users; user model driven personalised information discovery and retrieval; recommender systems; adaptive user interfaces and agents; adaptation for accessibility and inclusion; generic user modeling systems and tools; interoperability of user models; personalization in areas such as; affective computing; ubiquitous and mobile computing; language based interactions; multi-modal interactions; virtual and augmented reality; social media and the Web; human-robot interaction; behaviour change interventions; personalized applications in specific domains; privacy, accountability, and security of information for personalization; responsible adaptation: fairness, accountability, explainability, transparency and control; methods for the design and evaluation of user models and adaptive systems



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
