Yichen Liang, Haoxuan Dong, Dongjun Li, Ziyou Song
{"title":"考虑前车动态的网联电动汽车自适应生态巡航控制","authors":"Yichen Liang, Haoxuan Dong, Dongjun Li, Ziyou Song","doi":"10.1016/j.etran.2023.100299","DOIUrl":null,"url":null,"abstract":"<div><p>Energy consumption and driving safety of a vehicle are greatly influenced by the driving behaviors of the vehicle in front (also termed the preceding vehicle). Inappropriate responses to unanticipated changes in the preceding vehicle can lead to decreased energy efficiency and an increased risk of rear-end collisions. To address this issue, this study proposes an innovative Adaptive Eco-cruising Control Strategy (AECS) for connected electric vehicles (CEVs) considering the dynamic behavior prediction of the preceding vehicle. The AECS, which is designed with a two-stage receding horizon control framework, can adapt to scenarios where the preceding vehicle cuts in or moves out in a safer and energy-efficient manner compared to traditional eco-cruising strategies, which merely focus on a constant preceding vehicle. In the first stage, a prediction model for characterizing the dynamic behavior of preceding vehicles is developed using the Bayesian network. This model is trained using real-world vehicle driving data, allowing it to anticipate the driving trajectories of vehicles changing lanes in front. In the second stage, an energy-saving, safety, and driving comfort-oriented optimization problem is formulated as a quadratic programming form. The eco-cruising speed is then optimized to adapt to the dynamic traffic environment, especially when the preceding vehicle changes over time. Finally, several simulations are conducted to validate the AECS. The results demonstrate that the AECS can improve the energy efficiency of CEVs by up to 11.80% and 19.53% on average compared to the existing cruise control strategies and ensure vehicle driving safety and comfort, without compromising travel time. Additionally, the vehicle cut-in position, the cut-in vehicle speed, and the ego vehicle speed affect the energy efficiency improvement performance of the AECS.</p></div>","PeriodicalId":36355,"journal":{"name":"Etransportation","volume":"19 ","pages":"Article 100299"},"PeriodicalIF":17.0000,"publicationDate":"2024-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Adaptive eco-cruising control for connected electric vehicles considering a dynamic preceding vehicle\",\"authors\":\"Yichen Liang, Haoxuan Dong, Dongjun Li, Ziyou Song\",\"doi\":\"10.1016/j.etran.2023.100299\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Energy consumption and driving safety of a vehicle are greatly influenced by the driving behaviors of the vehicle in front (also termed the preceding vehicle). Inappropriate responses to unanticipated changes in the preceding vehicle can lead to decreased energy efficiency and an increased risk of rear-end collisions. To address this issue, this study proposes an innovative Adaptive Eco-cruising Control Strategy (AECS) for connected electric vehicles (CEVs) considering the dynamic behavior prediction of the preceding vehicle. The AECS, which is designed with a two-stage receding horizon control framework, can adapt to scenarios where the preceding vehicle cuts in or moves out in a safer and energy-efficient manner compared to traditional eco-cruising strategies, which merely focus on a constant preceding vehicle. In the first stage, a prediction model for characterizing the dynamic behavior of preceding vehicles is developed using the Bayesian network. This model is trained using real-world vehicle driving data, allowing it to anticipate the driving trajectories of vehicles changing lanes in front. In the second stage, an energy-saving, safety, and driving comfort-oriented optimization problem is formulated as a quadratic programming form. The eco-cruising speed is then optimized to adapt to the dynamic traffic environment, especially when the preceding vehicle changes over time. Finally, several simulations are conducted to validate the AECS. The results demonstrate that the AECS can improve the energy efficiency of CEVs by up to 11.80% and 19.53% on average compared to the existing cruise control strategies and ensure vehicle driving safety and comfort, without compromising travel time. Additionally, the vehicle cut-in position, the cut-in vehicle speed, and the ego vehicle speed affect the energy efficiency improvement performance of the AECS.</p></div>\",\"PeriodicalId\":36355,\"journal\":{\"name\":\"Etransportation\",\"volume\":\"19 \",\"pages\":\"Article 100299\"},\"PeriodicalIF\":17.0000,\"publicationDate\":\"2024-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Etransportation\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2590116823000747\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/12/3 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ENERGY & FUELS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Etransportation","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2590116823000747","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/12/3 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENERGY & FUELS","Score":null,"Total":0}
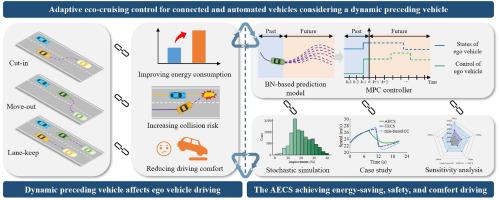
Adaptive eco-cruising control for connected electric vehicles considering a dynamic preceding vehicle
Energy consumption and driving safety of a vehicle are greatly influenced by the driving behaviors of the vehicle in front (also termed the preceding vehicle). Inappropriate responses to unanticipated changes in the preceding vehicle can lead to decreased energy efficiency and an increased risk of rear-end collisions. To address this issue, this study proposes an innovative Adaptive Eco-cruising Control Strategy (AECS) for connected electric vehicles (CEVs) considering the dynamic behavior prediction of the preceding vehicle. The AECS, which is designed with a two-stage receding horizon control framework, can adapt to scenarios where the preceding vehicle cuts in or moves out in a safer and energy-efficient manner compared to traditional eco-cruising strategies, which merely focus on a constant preceding vehicle. In the first stage, a prediction model for characterizing the dynamic behavior of preceding vehicles is developed using the Bayesian network. This model is trained using real-world vehicle driving data, allowing it to anticipate the driving trajectories of vehicles changing lanes in front. In the second stage, an energy-saving, safety, and driving comfort-oriented optimization problem is formulated as a quadratic programming form. The eco-cruising speed is then optimized to adapt to the dynamic traffic environment, especially when the preceding vehicle changes over time. Finally, several simulations are conducted to validate the AECS. The results demonstrate that the AECS can improve the energy efficiency of CEVs by up to 11.80% and 19.53% on average compared to the existing cruise control strategies and ensure vehicle driving safety and comfort, without compromising travel time. Additionally, the vehicle cut-in position, the cut-in vehicle speed, and the ego vehicle speed affect the energy efficiency improvement performance of the AECS.
期刊介绍:
eTransportation is a scholarly journal that aims to advance knowledge in the field of electric transportation. It focuses on all modes of transportation that utilize electricity as their primary source of energy, including electric vehicles, trains, ships, and aircraft. The journal covers all stages of research, development, and testing of new technologies, systems, and devices related to electrical transportation.
The journal welcomes the use of simulation and analysis tools at the system, transport, or device level. Its primary emphasis is on the study of the electrical and electronic aspects of transportation systems. However, it also considers research on mechanical parts or subsystems of vehicles if there is a clear interaction with electrical or electronic equipment.
Please note that this journal excludes other aspects such as sociological, political, regulatory, or environmental factors from its scope.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
