{"title":"船载 GNSS/INS 集成导航系统的稳健因子图优化方法","authors":"Yuan Hu, Haozheng Li, Wei Liu","doi":"10.1049/rsn2.12521","DOIUrl":null,"url":null,"abstract":"<p>Robust Global Navigation Satellite System (GNSS) factors are introduced into a factor graph optimisation based integrated navigation system to address the challenge of occluded GNSS signals during ship navigation, which leads to increased errors in positioning results. To enhance the robustness of the GNSS tracking loop, a vector tracking method is applied to receiver tracking loop. Then, the Mahalanobis distance was employed to assess the pseudorange residual and identify and reject signals that exhibit anomalies. Specifically, the pseudorange residual is computed as the difference between the predicted pseudorange of the GNSS receiver and the measured pseudorange. Using the historical information in the window, robust GNSS factors were constructed for use in the factor graph. The robust factor graph optimisation method for a shipborne GNSS/Inertial Navigation System integrated navigation system was implemented by constructing robust GNSS factors and Inertial Measurement Unit factors. The experimental results confirm that the positioning accuracy of the proposed method is superior to those of the factor graph optimization and extended Kalman filter.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":"18 5","pages":"782-798"},"PeriodicalIF":1.5000,"publicationDate":"2023-12-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12521","citationCount":"0","resultStr":"{\"title\":\"Robust factor graph optimisation method for shipborne GNSS/INS integrated navigation system\",\"authors\":\"Yuan Hu, Haozheng Li, Wei Liu\",\"doi\":\"10.1049/rsn2.12521\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Robust Global Navigation Satellite System (GNSS) factors are introduced into a factor graph optimisation based integrated navigation system to address the challenge of occluded GNSS signals during ship navigation, which leads to increased errors in positioning results. To enhance the robustness of the GNSS tracking loop, a vector tracking method is applied to receiver tracking loop. Then, the Mahalanobis distance was employed to assess the pseudorange residual and identify and reject signals that exhibit anomalies. Specifically, the pseudorange residual is computed as the difference between the predicted pseudorange of the GNSS receiver and the measured pseudorange. Using the historical information in the window, robust GNSS factors were constructed for use in the factor graph. The robust factor graph optimisation method for a shipborne GNSS/Inertial Navigation System integrated navigation system was implemented by constructing robust GNSS factors and Inertial Measurement Unit factors. The experimental results confirm that the positioning accuracy of the proposed method is superior to those of the factor graph optimization and extended Kalman filter.</p>\",\"PeriodicalId\":50377,\"journal\":{\"name\":\"Iet Radar Sonar and Navigation\",\"volume\":\"18 5\",\"pages\":\"782-798\"},\"PeriodicalIF\":1.5000,\"publicationDate\":\"2023-12-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12521\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iet Radar Sonar and Navigation\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/rsn2.12521\",\"RegionNum\":4,\"RegionCategory\":\"管理学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/rsn2.12521","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Robust factor graph optimisation method for shipborne GNSS/INS integrated navigation system
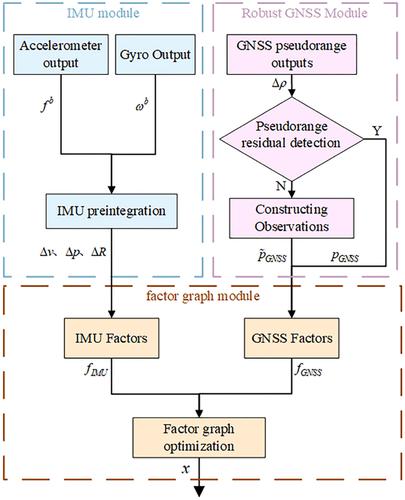
Robust Global Navigation Satellite System (GNSS) factors are introduced into a factor graph optimisation based integrated navigation system to address the challenge of occluded GNSS signals during ship navigation, which leads to increased errors in positioning results. To enhance the robustness of the GNSS tracking loop, a vector tracking method is applied to receiver tracking loop. Then, the Mahalanobis distance was employed to assess the pseudorange residual and identify and reject signals that exhibit anomalies. Specifically, the pseudorange residual is computed as the difference between the predicted pseudorange of the GNSS receiver and the measured pseudorange. Using the historical information in the window, robust GNSS factors were constructed for use in the factor graph. The robust factor graph optimisation method for a shipborne GNSS/Inertial Navigation System integrated navigation system was implemented by constructing robust GNSS factors and Inertial Measurement Unit factors. The experimental results confirm that the positioning accuracy of the proposed method is superior to those of the factor graph optimization and extended Kalman filter.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
