{"title":"针对传感器高度未知和系统测量误差的三维轴承源定位的新型高效估算器","authors":"Heng-Yu Hu, Ji-An Luo, Dong-Liang Peng","doi":"10.1049/rsn2.12520","DOIUrl":null,"url":null,"abstract":"<p>A novel two-stage profile maximum likelihood estimator is proposed to estimate the source location and the systematic errors jointly, with the aim of addressing the problem of source localisation using angle-only measurements from a single sensor with unknown sensor altitude and systematic measurement errors. The proposed two-stage profile maximum likelihood estimator algorithm is capable of decoupling the azimuth and elevation angle measurements while transforming the original maximum likelihood optimisation problem into two sub-problems, that is, two-dimensional-projected maximum likelihood estimator and relative altitude maximum likelihood estimator. In terms of the two-dimensional-projected maximum likelihood estimator, an algorithm combining pseudo-linear estimating and Kalman filtering is proposed to generate an initial estimate. Subsequently, a Gauss–Newton iterative method is developed to estimate the two-dimensional-projected target location and the azimuth systematic error jointly. The relative height maximum likelihood estimator is initialised using a pseudo-linear estimator. Next, a Gauss–Newton iterative algorithm is adopted to estimate the elevation systematic error and the relative height. As indicated by the result of the simulation studies, the proposed algorithm exhibits an estimation performance close to the Cramér–Rao lower bound with unknown sensor altitude and systematic measurement errors.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":"18 5","pages":"799-811"},"PeriodicalIF":1.5000,"publicationDate":"2023-12-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12520","citationCount":"0","resultStr":"{\"title\":\"A novel efficient estimator for three-dimensional bearings-only source localisation with unknown sensor altitude and systematic measurement errors\",\"authors\":\"Heng-Yu Hu, Ji-An Luo, Dong-Liang Peng\",\"doi\":\"10.1049/rsn2.12520\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>A novel two-stage profile maximum likelihood estimator is proposed to estimate the source location and the systematic errors jointly, with the aim of addressing the problem of source localisation using angle-only measurements from a single sensor with unknown sensor altitude and systematic measurement errors. The proposed two-stage profile maximum likelihood estimator algorithm is capable of decoupling the azimuth and elevation angle measurements while transforming the original maximum likelihood optimisation problem into two sub-problems, that is, two-dimensional-projected maximum likelihood estimator and relative altitude maximum likelihood estimator. In terms of the two-dimensional-projected maximum likelihood estimator, an algorithm combining pseudo-linear estimating and Kalman filtering is proposed to generate an initial estimate. Subsequently, a Gauss–Newton iterative method is developed to estimate the two-dimensional-projected target location and the azimuth systematic error jointly. The relative height maximum likelihood estimator is initialised using a pseudo-linear estimator. Next, a Gauss–Newton iterative algorithm is adopted to estimate the elevation systematic error and the relative height. As indicated by the result of the simulation studies, the proposed algorithm exhibits an estimation performance close to the Cramér–Rao lower bound with unknown sensor altitude and systematic measurement errors.</p>\",\"PeriodicalId\":50377,\"journal\":{\"name\":\"Iet Radar Sonar and Navigation\",\"volume\":\"18 5\",\"pages\":\"799-811\"},\"PeriodicalIF\":1.5000,\"publicationDate\":\"2023-12-10\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12520\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iet Radar Sonar and Navigation\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/rsn2.12520\",\"RegionNum\":4,\"RegionCategory\":\"管理学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/rsn2.12520","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
A novel efficient estimator for three-dimensional bearings-only source localisation with unknown sensor altitude and systematic measurement errors
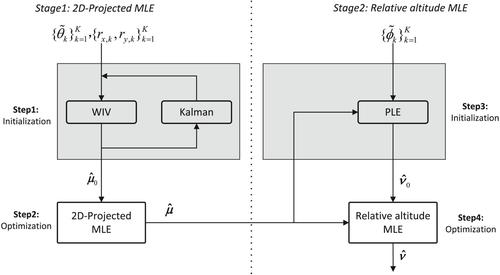
A novel two-stage profile maximum likelihood estimator is proposed to estimate the source location and the systematic errors jointly, with the aim of addressing the problem of source localisation using angle-only measurements from a single sensor with unknown sensor altitude and systematic measurement errors. The proposed two-stage profile maximum likelihood estimator algorithm is capable of decoupling the azimuth and elevation angle measurements while transforming the original maximum likelihood optimisation problem into two sub-problems, that is, two-dimensional-projected maximum likelihood estimator and relative altitude maximum likelihood estimator. In terms of the two-dimensional-projected maximum likelihood estimator, an algorithm combining pseudo-linear estimating and Kalman filtering is proposed to generate an initial estimate. Subsequently, a Gauss–Newton iterative method is developed to estimate the two-dimensional-projected target location and the azimuth systematic error jointly. The relative height maximum likelihood estimator is initialised using a pseudo-linear estimator. Next, a Gauss–Newton iterative algorithm is adopted to estimate the elevation systematic error and the relative height. As indicated by the result of the simulation studies, the proposed algorithm exhibits an estimation performance close to the Cramér–Rao lower bound with unknown sensor altitude and systematic measurement errors.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
