M. Akhtaruzzaman , Amir A. Shafie , Md Raisuddin Khan , Md Mozasser Rahman
{"title":"机器人辅助膝关节 RoM 运动:通过阻抗估计实现 PID 并行补偿器架构","authors":"M. Akhtaruzzaman , Amir A. Shafie , Md Raisuddin Khan , Md Mozasser Rahman","doi":"10.1016/j.cogr.2023.11.003","DOIUrl":null,"url":null,"abstract":"<div><p>Knee joint rehabilitation exercise refers to a therapeutic procedure of a patient having dysfunctions in certain abilities to move knee joint due to some medical conditions like trauma or paralysis. The exercise is basically a series of repeated assistive physical movements within the range of motion (RoM) of the joint. Reflex action of limbs during RoM exercise causes inappropriate balance of load which may cause secondary injuries, such as damages of muscle or tendon tissues. Establishing correlation between impedance data and limb motions is important to solve this problem. This paper aims to design and modeling of a robotic arm with an original approach in control strategy which is developed based on the correlation in between the joint-impedances and joint-motion characteristics during exercise. The knee joint impedances are estimated based on the internal feedback of the system dynamics, that lead to design the torque compensator to improve the overall control signals in real time. This paper also demonstrates the characteristics of various responses of the system during exercise with human subject. Results have reflected good performances with low position and velocity tracking errors, <span><math><mrow><mo>±</mo><mn>0</mn><mo>.</mo><msup><mn>02</mn><mo>∘</mo></msup></mrow></math></span> and <span><math><mrow><mn>0.04</mn><mi>r</mi><mi>a</mi><mi>d</mi><mo>.</mo><mi>s</mi><mi>e</mi><msup><mi>c</mi><mrow><mo>−</mo><mn>1</mn></mrow></msup></mrow></math></span> during hold phase; and <span><math><mrow><mo>±</mo><mn>0</mn><mo>.</mo><msup><mn>14</mn><mo>∘</mo></msup></mrow></math></span> and <span><math><mrow><mn>0.17</mn><mi>r</mi><mi>a</mi><mi>d</mi><mo>.</mo><mi>s</mi><mi>e</mi><msup><mi>c</mi><mrow><mo>−</mo><mn>1</mn></mrow></msup></mrow></math></span> during motion phse. Though, the limitation of the prototype is its current RoM (limited to <span><math><msup><mn>0</mn><mo>∘</mo></msup></math></span>–<span><math><msup><mn>25</mn><mo>∘</mo></msup></math></span>), the system has potential in the application of RoM exercise for paraplegic or monoplegic patients.</p></div>","PeriodicalId":100288,"journal":{"name":"Cognitive Robotics","volume":"4 ","pages":"Pages 42-61"},"PeriodicalIF":0.0000,"publicationDate":"2024-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S266724132300040X/pdfft?md5=e66adda08f021e960ed5946bd42e69d8&pid=1-s2.0-S266724132300040X-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Robot assisted knee joint RoM exercise: A PID parallel compensator architecture through impedance estimation\",\"authors\":\"M. Akhtaruzzaman , Amir A. Shafie , Md Raisuddin Khan , Md Mozasser Rahman\",\"doi\":\"10.1016/j.cogr.2023.11.003\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Knee joint rehabilitation exercise refers to a therapeutic procedure of a patient having dysfunctions in certain abilities to move knee joint due to some medical conditions like trauma or paralysis. The exercise is basically a series of repeated assistive physical movements within the range of motion (RoM) of the joint. Reflex action of limbs during RoM exercise causes inappropriate balance of load which may cause secondary injuries, such as damages of muscle or tendon tissues. Establishing correlation between impedance data and limb motions is important to solve this problem. This paper aims to design and modeling of a robotic arm with an original approach in control strategy which is developed based on the correlation in between the joint-impedances and joint-motion characteristics during exercise. The knee joint impedances are estimated based on the internal feedback of the system dynamics, that lead to design the torque compensator to improve the overall control signals in real time. This paper also demonstrates the characteristics of various responses of the system during exercise with human subject. Results have reflected good performances with low position and velocity tracking errors, <span><math><mrow><mo>±</mo><mn>0</mn><mo>.</mo><msup><mn>02</mn><mo>∘</mo></msup></mrow></math></span> and <span><math><mrow><mn>0.04</mn><mi>r</mi><mi>a</mi><mi>d</mi><mo>.</mo><mi>s</mi><mi>e</mi><msup><mi>c</mi><mrow><mo>−</mo><mn>1</mn></mrow></msup></mrow></math></span> during hold phase; and <span><math><mrow><mo>±</mo><mn>0</mn><mo>.</mo><msup><mn>14</mn><mo>∘</mo></msup></mrow></math></span> and <span><math><mrow><mn>0.17</mn><mi>r</mi><mi>a</mi><mi>d</mi><mo>.</mo><mi>s</mi><mi>e</mi><msup><mi>c</mi><mrow><mo>−</mo><mn>1</mn></mrow></msup></mrow></math></span> during motion phse. Though, the limitation of the prototype is its current RoM (limited to <span><math><msup><mn>0</mn><mo>∘</mo></msup></math></span>–<span><math><msup><mn>25</mn><mo>∘</mo></msup></math></span>), the system has potential in the application of RoM exercise for paraplegic or monoplegic patients.</p></div>\",\"PeriodicalId\":100288,\"journal\":{\"name\":\"Cognitive Robotics\",\"volume\":\"4 \",\"pages\":\"Pages 42-61\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S266724132300040X/pdfft?md5=e66adda08f021e960ed5946bd42e69d8&pid=1-s2.0-S266724132300040X-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cognitive Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S266724132300040X\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/12/9 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cognitive Robotics","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S266724132300040X","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/12/9 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
摘要
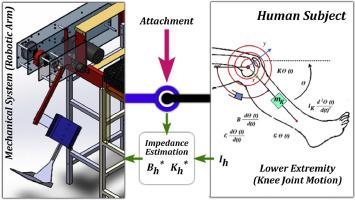
膝关节康复锻炼是指对因外伤或瘫痪等疾病导致膝关节活动能力障碍的患者进行的一种治疗程序。这项运动基本上是在关节活动范围(RoM)内反复进行一系列辅助性肢体运动。在 RoM 运动过程中,肢体的反射动作会导致不适当的负荷平衡,从而可能造成二次伤害,如肌肉或肌腱组织损伤。建立阻抗数据与肢体运动之间的相关性对于解决这一问题非常重要。本文旨在设计一种机械臂,并根据运动时关节阻抗和关节运动特性之间的相关性,采用一种新颖的控制策略对其进行建模。膝关节阻抗是根据系统动态的内部反馈进行估算的,从而设计出扭矩补偿器,实时改善整体控制信号。本文还展示了该系统在人体运动时的各种响应特性。结果表明,该系统性能良好,位置和速度跟踪误差小,在保持阶段分别为 ±0.02∘ 和 0.04rad.sec-1;在运动阶段分别为 ±0.14∘ 和 0.17rad.sec-1。虽然该原型的局限性在于其当前的 RoM(仅限于 0∘-25∘),但该系统在截瘫或单瘫患者的 RoM 运动应用方面具有潜力。
Robot assisted knee joint RoM exercise: A PID parallel compensator architecture through impedance estimation
Knee joint rehabilitation exercise refers to a therapeutic procedure of a patient having dysfunctions in certain abilities to move knee joint due to some medical conditions like trauma or paralysis. The exercise is basically a series of repeated assistive physical movements within the range of motion (RoM) of the joint. Reflex action of limbs during RoM exercise causes inappropriate balance of load which may cause secondary injuries, such as damages of muscle or tendon tissues. Establishing correlation between impedance data and limb motions is important to solve this problem. This paper aims to design and modeling of a robotic arm with an original approach in control strategy which is developed based on the correlation in between the joint-impedances and joint-motion characteristics during exercise. The knee joint impedances are estimated based on the internal feedback of the system dynamics, that lead to design the torque compensator to improve the overall control signals in real time. This paper also demonstrates the characteristics of various responses of the system during exercise with human subject. Results have reflected good performances with low position and velocity tracking errors, and during hold phase; and and during motion phse. Though, the limitation of the prototype is its current RoM (limited to –), the system has potential in the application of RoM exercise for paraplegic or monoplegic patients.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
