{"title":"多静态雷达分布几何形状对参数估计精度的影响","authors":"D. Dhulashia, M. A. Ritchie","doi":"10.1049/rsn2.12529","DOIUrl":null,"url":null,"abstract":"<p>An analysis of the parameter estimation uncertainty for the target location and velocity achievable using a single-transmitter-multiple-receiver multistatic radar system is presented. A framework for establishing measures of multistatic radar parameter uncertainties by expansion of the bistatic radar parameter uncertainty measures is presented for systems containing omnidirectionally radiating nodes. The methodology uses analytical methods based on the Cramér–Rao Lower Bounds applied to scenarios in a two-dimensional physical space with a single target exhibiting Doppler characteristics and a bistatic angle dependent radar cross-section. A set of geometric descriptors is proposed to characterise the system, and parameter uncertainty results are reported as a function of these descriptors. The results indicate that angular separation between the transmitter and the centre of the receiver distribution is of greater importance than the quantity of receivers within the system when low uncertainty estimation capabilities are desired, though a minimum of two receivers must be available. The proportion of receivers within the system which contributed information crucial to obtaining the minimum estimation uncertainty is reported for systems containing different quantities of receivers. It was observed that, as the total number of receivers available increased, the proportion of receivers required to achieve the minimal uncertainty level reduces significantly.</p>","PeriodicalId":50377,"journal":{"name":"Iet Radar Sonar and Navigation","volume":"18 1","pages":"7-22"},"PeriodicalIF":1.5000,"publicationDate":"2024-01-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12529","citationCount":"0","resultStr":"{\"title\":\"Multistatic radar distribution geometry effects on parameter estimation accuracy\",\"authors\":\"D. Dhulashia, M. A. Ritchie\",\"doi\":\"10.1049/rsn2.12529\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>An analysis of the parameter estimation uncertainty for the target location and velocity achievable using a single-transmitter-multiple-receiver multistatic radar system is presented. A framework for establishing measures of multistatic radar parameter uncertainties by expansion of the bistatic radar parameter uncertainty measures is presented for systems containing omnidirectionally radiating nodes. The methodology uses analytical methods based on the Cramér–Rao Lower Bounds applied to scenarios in a two-dimensional physical space with a single target exhibiting Doppler characteristics and a bistatic angle dependent radar cross-section. A set of geometric descriptors is proposed to characterise the system, and parameter uncertainty results are reported as a function of these descriptors. The results indicate that angular separation between the transmitter and the centre of the receiver distribution is of greater importance than the quantity of receivers within the system when low uncertainty estimation capabilities are desired, though a minimum of two receivers must be available. The proportion of receivers within the system which contributed information crucial to obtaining the minimum estimation uncertainty is reported for systems containing different quantities of receivers. It was observed that, as the total number of receivers available increased, the proportion of receivers required to achieve the minimal uncertainty level reduces significantly.</p>\",\"PeriodicalId\":50377,\"journal\":{\"name\":\"Iet Radar Sonar and Navigation\",\"volume\":\"18 1\",\"pages\":\"7-22\"},\"PeriodicalIF\":1.5000,\"publicationDate\":\"2024-01-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/rsn2.12529\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iet Radar Sonar and Navigation\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/rsn2.12529\",\"RegionNum\":4,\"RegionCategory\":\"管理学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iet Radar Sonar and Navigation","FirstCategoryId":"94","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/rsn2.12529","RegionNum":4,"RegionCategory":"管理学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Multistatic radar distribution geometry effects on parameter estimation accuracy
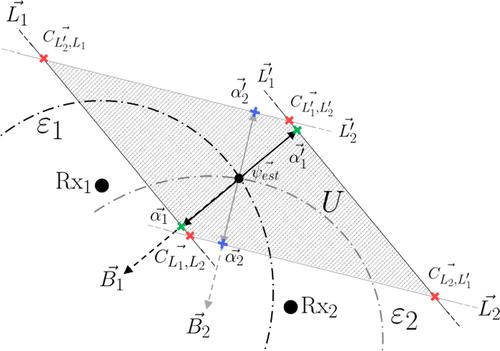
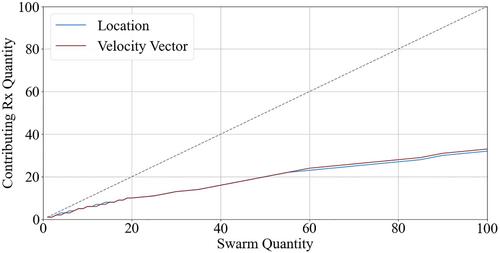
An analysis of the parameter estimation uncertainty for the target location and velocity achievable using a single-transmitter-multiple-receiver multistatic radar system is presented. A framework for establishing measures of multistatic radar parameter uncertainties by expansion of the bistatic radar parameter uncertainty measures is presented for systems containing omnidirectionally radiating nodes. The methodology uses analytical methods based on the Cramér–Rao Lower Bounds applied to scenarios in a two-dimensional physical space with a single target exhibiting Doppler characteristics and a bistatic angle dependent radar cross-section. A set of geometric descriptors is proposed to characterise the system, and parameter uncertainty results are reported as a function of these descriptors. The results indicate that angular separation between the transmitter and the centre of the receiver distribution is of greater importance than the quantity of receivers within the system when low uncertainty estimation capabilities are desired, though a minimum of two receivers must be available. The proportion of receivers within the system which contributed information crucial to obtaining the minimum estimation uncertainty is reported for systems containing different quantities of receivers. It was observed that, as the total number of receivers available increased, the proportion of receivers required to achieve the minimal uncertainty level reduces significantly.
期刊介绍:
IET Radar, Sonar & Navigation covers the theory and practice of systems and signals for radar, sonar, radiolocation, navigation, and surveillance purposes, in aerospace and terrestrial applications.
Examples include advances in waveform design, clutter and detection, electronic warfare, adaptive array and superresolution methods, tracking algorithms, synthetic aperture, and target recognition techniques.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
