{"title":"多机器人砌砖系统约束控制结构的实验验证","authors":"Michele Ambrosino , Fabian Boucher , Pierre Mengeot , Emanuele Garone","doi":"10.1016/j.mechatronics.2024.103139","DOIUrl":null,"url":null,"abstract":"<div><p><span>Robotics in construction is an emerging field that aims to automate various construction activities. Among the various innovative technologies for the construction sector, in this paper we focus on robotic solutions for the bricklaying task. In particular, we describe and explain in detail the implementation of a control framework for a recently introduced multi-robot bricklaying concept, specifically designed for laying activities with large and heavy blocks. The multi-robot system subject of this work is based on the collaboration of a robotic manipulator and a crane. The control architecture proposed to perform the construction task belongs to the Explicit Reference Governor (ERG) formalism. The ERG is a constrained control structure that enforces the constraints of the system and ensures that the </span>robotic system<span> operates correctly and safely. The efficiency of the proposed solution is confirmed by experimental validation on a custom-made crane and a KUKA LBR IIWA14R820 robotic arm.</span></p></div>","PeriodicalId":49842,"journal":{"name":"Mechatronics","volume":"98 ","pages":"Article 103139"},"PeriodicalIF":3.1000,"publicationDate":"2024-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Experimental validation of a constrained control architecture for a multi-robot bricklayer system\",\"authors\":\"Michele Ambrosino , Fabian Boucher , Pierre Mengeot , Emanuele Garone\",\"doi\":\"10.1016/j.mechatronics.2024.103139\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p><span>Robotics in construction is an emerging field that aims to automate various construction activities. Among the various innovative technologies for the construction sector, in this paper we focus on robotic solutions for the bricklaying task. In particular, we describe and explain in detail the implementation of a control framework for a recently introduced multi-robot bricklaying concept, specifically designed for laying activities with large and heavy blocks. The multi-robot system subject of this work is based on the collaboration of a robotic manipulator and a crane. The control architecture proposed to perform the construction task belongs to the Explicit Reference Governor (ERG) formalism. The ERG is a constrained control structure that enforces the constraints of the system and ensures that the </span>robotic system<span> operates correctly and safely. The efficiency of the proposed solution is confirmed by experimental validation on a custom-made crane and a KUKA LBR IIWA14R820 robotic arm.</span></p></div>\",\"PeriodicalId\":49842,\"journal\":{\"name\":\"Mechatronics\",\"volume\":\"98 \",\"pages\":\"Article 103139\"},\"PeriodicalIF\":3.1000,\"publicationDate\":\"2024-04-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Mechatronics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0957415824000047\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/23 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Mechatronics","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0957415824000047","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/23 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Experimental validation of a constrained control architecture for a multi-robot bricklayer system
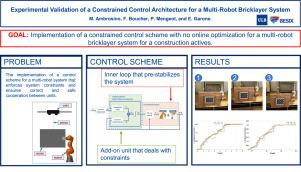
Robotics in construction is an emerging field that aims to automate various construction activities. Among the various innovative technologies for the construction sector, in this paper we focus on robotic solutions for the bricklaying task. In particular, we describe and explain in detail the implementation of a control framework for a recently introduced multi-robot bricklaying concept, specifically designed for laying activities with large and heavy blocks. The multi-robot system subject of this work is based on the collaboration of a robotic manipulator and a crane. The control architecture proposed to perform the construction task belongs to the Explicit Reference Governor (ERG) formalism. The ERG is a constrained control structure that enforces the constraints of the system and ensures that the robotic system operates correctly and safely. The efficiency of the proposed solution is confirmed by experimental validation on a custom-made crane and a KUKA LBR IIWA14R820 robotic arm.
期刊介绍:
Mechatronics is the synergistic combination of precision mechanical engineering, electronic control and systems thinking in the design of products and manufacturing processes. It relates to the design of systems, devices and products aimed at achieving an optimal balance between basic mechanical structure and its overall control. The purpose of this journal is to provide rapid publication of topical papers featuring practical developments in mechatronics. It will cover a wide range of application areas including consumer product design, instrumentation, manufacturing methods, computer integration and process and device control, and will attract a readership from across the industrial and academic research spectrum. Particular importance will be attached to aspects of innovation in mechatronics design philosophy which illustrate the benefits obtainable by an a priori integration of functionality with embedded microprocessor control. A major item will be the design of machines, devices and systems possessing a degree of computer based intelligence. The journal seeks to publish research progress in this field with an emphasis on the applied rather than the theoretical. It will also serve the dual role of bringing greater recognition to this important area of engineering.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
