{"title":"利用基于 RL 的自动驾驶车辆车头控制对多个连续瓶颈进行高速公路拥堵管理","authors":"Lina Elmorshedy, Ilia Smirnov, Baher Abdulhai","doi":"10.1049/itr2.12492","DOIUrl":null,"url":null,"abstract":"<p>Adaptive cruise control (ACC) is the core building block of future full autonomous driving. Numerous recent research demonstrated that Autonomous Vehicles (AVs) adopting shorter headways generally increase road capacity and may relieve congestion at bottlenecks for moderate demand scenarios. However, with high demand scenarios, bottlenecks can still be activated causing capacity breakdown. Therefore, extra control measures as dynamic traffic control near bottlenecks is necessary. The challenge is harder on urban freeways with consecutive bottlenecks which affect each other. This paper aims to improve the performance of ACC systems in a high demand scenario. A multi-bottleneck dynamic headway control strategy based on deep reinforcement learning (DRL) that adapts headways to optimize traffic flow and minimize delay is proposed. The controller dynamically assigns an optimal headway for each controlled section, based on state measurement representing the current traffic conditions. The case study is a freeway stretch with three consecutive bottlenecks which is then extended to include eight bottlenecks. Three different RL agent configurations are presented and compared. It is quantitatively demonstrated that the proposed control strategy improves traffic and enhances the system delay by up to 22.30%, and 18.87% compared to shortest headway setting for the three-bottleneck and the eight-bottleneck networks, respectively.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 6","pages":"1137-1163"},"PeriodicalIF":2.5000,"publicationDate":"2024-02-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12492","citationCount":"0","resultStr":"{\"title\":\"Freeway congestion management on multiple consecutive bottlenecks with RL-based headway control of autonomous vehicles\",\"authors\":\"Lina Elmorshedy, Ilia Smirnov, Baher Abdulhai\",\"doi\":\"10.1049/itr2.12492\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Adaptive cruise control (ACC) is the core building block of future full autonomous driving. Numerous recent research demonstrated that Autonomous Vehicles (AVs) adopting shorter headways generally increase road capacity and may relieve congestion at bottlenecks for moderate demand scenarios. However, with high demand scenarios, bottlenecks can still be activated causing capacity breakdown. Therefore, extra control measures as dynamic traffic control near bottlenecks is necessary. The challenge is harder on urban freeways with consecutive bottlenecks which affect each other. This paper aims to improve the performance of ACC systems in a high demand scenario. A multi-bottleneck dynamic headway control strategy based on deep reinforcement learning (DRL) that adapts headways to optimize traffic flow and minimize delay is proposed. The controller dynamically assigns an optimal headway for each controlled section, based on state measurement representing the current traffic conditions. The case study is a freeway stretch with three consecutive bottlenecks which is then extended to include eight bottlenecks. Three different RL agent configurations are presented and compared. It is quantitatively demonstrated that the proposed control strategy improves traffic and enhances the system delay by up to 22.30%, and 18.87% compared to shortest headway setting for the three-bottleneck and the eight-bottleneck networks, respectively.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 6\",\"pages\":\"1137-1163\"},\"PeriodicalIF\":2.5000,\"publicationDate\":\"2024-02-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12492\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12492\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12492","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Freeway congestion management on multiple consecutive bottlenecks with RL-based headway control of autonomous vehicles
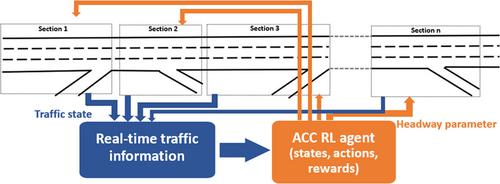
Adaptive cruise control (ACC) is the core building block of future full autonomous driving. Numerous recent research demonstrated that Autonomous Vehicles (AVs) adopting shorter headways generally increase road capacity and may relieve congestion at bottlenecks for moderate demand scenarios. However, with high demand scenarios, bottlenecks can still be activated causing capacity breakdown. Therefore, extra control measures as dynamic traffic control near bottlenecks is necessary. The challenge is harder on urban freeways with consecutive bottlenecks which affect each other. This paper aims to improve the performance of ACC systems in a high demand scenario. A multi-bottleneck dynamic headway control strategy based on deep reinforcement learning (DRL) that adapts headways to optimize traffic flow and minimize delay is proposed. The controller dynamically assigns an optimal headway for each controlled section, based on state measurement representing the current traffic conditions. The case study is a freeway stretch with three consecutive bottlenecks which is then extended to include eight bottlenecks. Three different RL agent configurations are presented and compared. It is quantitatively demonstrated that the proposed control strategy improves traffic and enhances the system delay by up to 22.30%, and 18.87% compared to shortest headway setting for the three-bottleneck and the eight-bottleneck networks, respectively.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
