{"title":"基于 Dhouib-Matrix-SPP 方法的认知型移动机器人智能路径规划","authors":"Souhail Dhouib","doi":"10.1016/j.cogr.2024.02.001","DOIUrl":null,"url":null,"abstract":"<div><p>The Mobile Robot Path Problem looks to find the optimal shortest path from the starting point to the target point with collision-free for a mobile robot. This is a popular issue in robotics and in this paper the environment is considered as static and represented as a bidirectional grid map. Besides, the novel optimal method Dhouib-Matrix-SPP (DM-SPP) is applied to create the optimal shortest path for a mobile robot in a static environment. DM-SPP is a greedy method based on a column row navigation in the distance matrix and characterized by its rapidity to solve sparse graphs. The comparative analysis is conducted by applying DM-SPP on thirteen test cases and comparing its results to the results given by four metaheuristics the Max-Min Ant System, the Ant System with punitive measures, the A* and the Improved Hybrid A*. The outcomes acquired from different scenarios indicate that the proposed DM-SPP method can rapidly outperform the four predefined artificial intelligence methods.</p></div>","PeriodicalId":100288,"journal":{"name":"Cognitive Robotics","volume":"4 ","pages":"Pages 62-73"},"PeriodicalIF":0.0000,"publicationDate":"2024-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2667241324000028/pdfft?md5=753a3935e8733e20519f0d68f97e618f&pid=1-s2.0-S2667241324000028-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Intelligent path planning for cognitive mobile robot based on Dhouib-Matrix-SPP method\",\"authors\":\"Souhail Dhouib\",\"doi\":\"10.1016/j.cogr.2024.02.001\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>The Mobile Robot Path Problem looks to find the optimal shortest path from the starting point to the target point with collision-free for a mobile robot. This is a popular issue in robotics and in this paper the environment is considered as static and represented as a bidirectional grid map. Besides, the novel optimal method Dhouib-Matrix-SPP (DM-SPP) is applied to create the optimal shortest path for a mobile robot in a static environment. DM-SPP is a greedy method based on a column row navigation in the distance matrix and characterized by its rapidity to solve sparse graphs. The comparative analysis is conducted by applying DM-SPP on thirteen test cases and comparing its results to the results given by four metaheuristics the Max-Min Ant System, the Ant System with punitive measures, the A* and the Improved Hybrid A*. The outcomes acquired from different scenarios indicate that the proposed DM-SPP method can rapidly outperform the four predefined artificial intelligence methods.</p></div>\",\"PeriodicalId\":100288,\"journal\":{\"name\":\"Cognitive Robotics\",\"volume\":\"4 \",\"pages\":\"Pages 62-73\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2667241324000028/pdfft?md5=753a3935e8733e20519f0d68f97e618f&pid=1-s2.0-S2667241324000028-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cognitive Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2667241324000028\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cognitive Robotics","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2667241324000028","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Intelligent path planning for cognitive mobile robot based on Dhouib-Matrix-SPP method
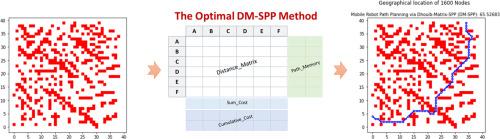
The Mobile Robot Path Problem looks to find the optimal shortest path from the starting point to the target point with collision-free for a mobile robot. This is a popular issue in robotics and in this paper the environment is considered as static and represented as a bidirectional grid map. Besides, the novel optimal method Dhouib-Matrix-SPP (DM-SPP) is applied to create the optimal shortest path for a mobile robot in a static environment. DM-SPP is a greedy method based on a column row navigation in the distance matrix and characterized by its rapidity to solve sparse graphs. The comparative analysis is conducted by applying DM-SPP on thirteen test cases and comparing its results to the results given by four metaheuristics the Max-Min Ant System, the Ant System with punitive measures, the A* and the Improved Hybrid A*. The outcomes acquired from different scenarios indicate that the proposed DM-SPP method can rapidly outperform the four predefined artificial intelligence methods.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
