{"title":"V2X 辅助自动驾驶汽车运动规划和控制的协同设计","authors":"Jiahang Li, Cailian Chen, Bo Yang","doi":"10.1049/itr2.12501","DOIUrl":null,"url":null,"abstract":"<p>The rapid development of vehicle-to-everything (V2X) communication technologies significantly promotes the revolution of intelligent transportation systems. V2X communication is expected to play a critical role in enhancing the safety and efficiency of connected and automated vehicles (CAVs), especially for mixed traffic scenarios. Additionally, the computational and storage capabilities of roadside units (RSUs) will be harnessed to effectively enhance the motion planning and control performance of CAVs within the constraints of limited on-board computational resources. Thus, a V2X assisted co-design of motion planning and control algorithm for CAVs to improve their situational awareness and computational efficiency is proposed. Under this architecture, a pre-planning algorithm is proposed first to utilize the computational and storage capabilities of RSUs and generate feasible trajectories for different driving tasks. By analysing the relationship between driving risk index and motion planning performance, an online-planning algorithm is derived to modify the pre-planned trajectories in real-time with static or dynamic obstacles. Furthermore, the lateral and longitudinal control of the vehicle using the Frenet coordinate system is decoupled. The lateral control employs an offline linear quadratic regulator (LQR) from RSUs to control the steering angle of the vehicle. The longitudinal control employs a dual-loop PID to control the throttle opening of the vehicle. The performance of the proposed framework is evaluated and demonstrated by a Carsim-Prescan simulation study in different mixed traffic scenarios. Compared with conventional methods, the proposed method improves the computational efficiency by 23% and reduces the collision rate by 13%.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 12","pages":"2601-2617"},"PeriodicalIF":2.5000,"publicationDate":"2024-03-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12501","citationCount":"0","resultStr":"{\"title\":\"V2X assisted co-design of motion planning and control for connected automated vehicle\",\"authors\":\"Jiahang Li, Cailian Chen, Bo Yang\",\"doi\":\"10.1049/itr2.12501\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The rapid development of vehicle-to-everything (V2X) communication technologies significantly promotes the revolution of intelligent transportation systems. V2X communication is expected to play a critical role in enhancing the safety and efficiency of connected and automated vehicles (CAVs), especially for mixed traffic scenarios. Additionally, the computational and storage capabilities of roadside units (RSUs) will be harnessed to effectively enhance the motion planning and control performance of CAVs within the constraints of limited on-board computational resources. Thus, a V2X assisted co-design of motion planning and control algorithm for CAVs to improve their situational awareness and computational efficiency is proposed. Under this architecture, a pre-planning algorithm is proposed first to utilize the computational and storage capabilities of RSUs and generate feasible trajectories for different driving tasks. By analysing the relationship between driving risk index and motion planning performance, an online-planning algorithm is derived to modify the pre-planned trajectories in real-time with static or dynamic obstacles. Furthermore, the lateral and longitudinal control of the vehicle using the Frenet coordinate system is decoupled. The lateral control employs an offline linear quadratic regulator (LQR) from RSUs to control the steering angle of the vehicle. The longitudinal control employs a dual-loop PID to control the throttle opening of the vehicle. The performance of the proposed framework is evaluated and demonstrated by a Carsim-Prescan simulation study in different mixed traffic scenarios. Compared with conventional methods, the proposed method improves the computational efficiency by 23% and reduces the collision rate by 13%.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 12\",\"pages\":\"2601-2617\"},\"PeriodicalIF\":2.5000,\"publicationDate\":\"2024-03-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12501\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12501\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12501","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
V2X assisted co-design of motion planning and control for connected automated vehicle
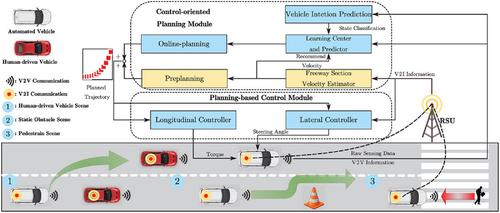
The rapid development of vehicle-to-everything (V2X) communication technologies significantly promotes the revolution of intelligent transportation systems. V2X communication is expected to play a critical role in enhancing the safety and efficiency of connected and automated vehicles (CAVs), especially for mixed traffic scenarios. Additionally, the computational and storage capabilities of roadside units (RSUs) will be harnessed to effectively enhance the motion planning and control performance of CAVs within the constraints of limited on-board computational resources. Thus, a V2X assisted co-design of motion planning and control algorithm for CAVs to improve their situational awareness and computational efficiency is proposed. Under this architecture, a pre-planning algorithm is proposed first to utilize the computational and storage capabilities of RSUs and generate feasible trajectories for different driving tasks. By analysing the relationship between driving risk index and motion planning performance, an online-planning algorithm is derived to modify the pre-planned trajectories in real-time with static or dynamic obstacles. Furthermore, the lateral and longitudinal control of the vehicle using the Frenet coordinate system is decoupled. The lateral control employs an offline linear quadratic regulator (LQR) from RSUs to control the steering angle of the vehicle. The longitudinal control employs a dual-loop PID to control the throttle opening of the vehicle. The performance of the proposed framework is evaluated and demonstrated by a Carsim-Prescan simulation study in different mixed traffic scenarios. Compared with conventional methods, the proposed method improves the computational efficiency by 23% and reduces the collision rate by 13%.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf






 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
