Lucas C. van Laake , Alberto Comoretto , Johannes T.B. Overvelde
{"title":"论软滞后阀中压力调节和振荡模式的共存","authors":"Lucas C. van Laake , Alberto Comoretto , Johannes T.B. Overvelde","doi":"10.1016/j.jfluidstructs.2024.104090","DOIUrl":null,"url":null,"abstract":"<div><p>Fluidic circuits are a promising recent development in embodied control of soft robots. These circuits typically make use of highly non-linear soft components to enable complex behaviors given simple inputs, such as constant flow or pressure. This approach greatly simplifies control, as it removes the need for external hardware or software. However, detailed fundamental understanding of the non-linear, coupled fluidic and mechanical behavior of these components is lacking. Such understanding is needed to guide new designs and increase the reliability of increasingly autonomous soft robots. Here, we develop an analytical model that captures the coexistence of a pressure regulation mode and an oscillatory mode in a specific soft hysteretic valve design, that we previously used to achieve reprogrammable activation patterns in soft robots. We develop a model that describes the mechanics, fluidics and dynamics of the system by two coupled non-linear ordinary differential equations. The model shows good agreement with the experimental evidence, as well as correctly predicts the effect of design changes. Specifically, we experimentally show that we can remove the regulation mode at low input flow rates by changing the fluidic response of the valve. Taken together, the present study contributes to better understanding of system-level behavior of fluidic circuits for controlling soft robots. This may contribute to the reliability of soft robots with embodied control in future applications such as autonomous exploration and medical prosthetic devices.</p></div>","PeriodicalId":54834,"journal":{"name":"Journal of Fluids and Structures","volume":"126 ","pages":"Article 104090"},"PeriodicalIF":3.5000,"publicationDate":"2024-05-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S0889974624000252/pdfft?md5=d0aa7ed1329f9b210d1e3a79aa5b12a8&pid=1-s2.0-S0889974624000252-main.pdf","citationCount":"0","resultStr":"{\"title\":\"On the coexistence of pressure regulation and oscillation modes in soft hysteretic valves\",\"authors\":\"Lucas C. van Laake , Alberto Comoretto , Johannes T.B. Overvelde\",\"doi\":\"10.1016/j.jfluidstructs.2024.104090\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Fluidic circuits are a promising recent development in embodied control of soft robots. These circuits typically make use of highly non-linear soft components to enable complex behaviors given simple inputs, such as constant flow or pressure. This approach greatly simplifies control, as it removes the need for external hardware or software. However, detailed fundamental understanding of the non-linear, coupled fluidic and mechanical behavior of these components is lacking. Such understanding is needed to guide new designs and increase the reliability of increasingly autonomous soft robots. Here, we develop an analytical model that captures the coexistence of a pressure regulation mode and an oscillatory mode in a specific soft hysteretic valve design, that we previously used to achieve reprogrammable activation patterns in soft robots. We develop a model that describes the mechanics, fluidics and dynamics of the system by two coupled non-linear ordinary differential equations. The model shows good agreement with the experimental evidence, as well as correctly predicts the effect of design changes. Specifically, we experimentally show that we can remove the regulation mode at low input flow rates by changing the fluidic response of the valve. Taken together, the present study contributes to better understanding of system-level behavior of fluidic circuits for controlling soft robots. This may contribute to the reliability of soft robots with embodied control in future applications such as autonomous exploration and medical prosthetic devices.</p></div>\",\"PeriodicalId\":54834,\"journal\":{\"name\":\"Journal of Fluids and Structures\",\"volume\":\"126 \",\"pages\":\"Article 104090\"},\"PeriodicalIF\":3.5000,\"publicationDate\":\"2024-05-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S0889974624000252/pdfft?md5=d0aa7ed1329f9b210d1e3a79aa5b12a8&pid=1-s2.0-S0889974624000252-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Fluids and Structures\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0889974624000252\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/3/11 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Fluids and Structures","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0889974624000252","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/3/11 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
On the coexistence of pressure regulation and oscillation modes in soft hysteretic valves
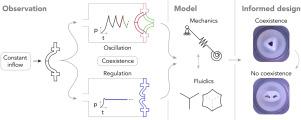
Fluidic circuits are a promising recent development in embodied control of soft robots. These circuits typically make use of highly non-linear soft components to enable complex behaviors given simple inputs, such as constant flow or pressure. This approach greatly simplifies control, as it removes the need for external hardware or software. However, detailed fundamental understanding of the non-linear, coupled fluidic and mechanical behavior of these components is lacking. Such understanding is needed to guide new designs and increase the reliability of increasingly autonomous soft robots. Here, we develop an analytical model that captures the coexistence of a pressure regulation mode and an oscillatory mode in a specific soft hysteretic valve design, that we previously used to achieve reprogrammable activation patterns in soft robots. We develop a model that describes the mechanics, fluidics and dynamics of the system by two coupled non-linear ordinary differential equations. The model shows good agreement with the experimental evidence, as well as correctly predicts the effect of design changes. Specifically, we experimentally show that we can remove the regulation mode at low input flow rates by changing the fluidic response of the valve. Taken together, the present study contributes to better understanding of system-level behavior of fluidic circuits for controlling soft robots. This may contribute to the reliability of soft robots with embodied control in future applications such as autonomous exploration and medical prosthetic devices.
期刊介绍:
The Journal of Fluids and Structures serves as a focal point and a forum for the exchange of ideas, for the many kinds of specialists and practitioners concerned with fluid–structure interactions and the dynamics of systems related thereto, in any field. One of its aims is to foster the cross–fertilization of ideas, methods and techniques in the various disciplines involved.
The journal publishes papers that present original and significant contributions on all aspects of the mechanical interactions between fluids and solids, regardless of scale.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
