Zeyu Huang , Sisi Dai , Kai Xu , Hao Zhang , Hui Huang , Ruizhen Hu
{"title":"DINA:可变形交互类比","authors":"Zeyu Huang , Sisi Dai , Kai Xu , Hao Zhang , Hui Huang , Ruizhen Hu","doi":"10.1016/j.gmod.2024.101217","DOIUrl":null,"url":null,"abstract":"<div><p>We introduce deformable interaction analogy (DINA) as a means to generate close interactions between two 3D objects. Given a single demo interaction between an anchor object (e.g. a hand) and a source object (e.g. a mug grasped by the hand), our goal is to generate many analogous 3D interactions between the same anchor object and various new target objects (e.g. a toy airplane), where the anchor object is allowed to be rigid or deformable. To this end, we optimize the pose or shape of the anchor object to adapt it to a new target object to mimic the demo. To facilitate the optimization, we advocate using interaction interface (ITF), defined by a set of points sampled on the anchor object, as a descriptive and robust interaction representation that is amenable to non-rigid deformation. We model similarity between interactions using ITF, while for interaction analogy, we transform the ITF, either rigidly or non-rigidly, to guide the feature matching to the reposing and deformation of the anchor object. Qualitative and quantitative experiments show that our ITF-guided deformable interaction analogy works surprisingly well even with simple distance features compared to variants of state-of-the-art methods that utilize more sophisticated interaction representations and feature learning from large datasets.</p></div>","PeriodicalId":55083,"journal":{"name":"Graphical Models","volume":"133 ","pages":"Article 101217"},"PeriodicalIF":2.2000,"publicationDate":"2024-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S1524070324000055/pdfft?md5=94513ad40e92d864add74b24ff48c5e2&pid=1-s2.0-S1524070324000055-main.pdf","citationCount":"0","resultStr":"{\"title\":\"DINA: Deformable INteraction Analogy\",\"authors\":\"Zeyu Huang , Sisi Dai , Kai Xu , Hao Zhang , Hui Huang , Ruizhen Hu\",\"doi\":\"10.1016/j.gmod.2024.101217\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>We introduce deformable interaction analogy (DINA) as a means to generate close interactions between two 3D objects. Given a single demo interaction between an anchor object (e.g. a hand) and a source object (e.g. a mug grasped by the hand), our goal is to generate many analogous 3D interactions between the same anchor object and various new target objects (e.g. a toy airplane), where the anchor object is allowed to be rigid or deformable. To this end, we optimize the pose or shape of the anchor object to adapt it to a new target object to mimic the demo. To facilitate the optimization, we advocate using interaction interface (ITF), defined by a set of points sampled on the anchor object, as a descriptive and robust interaction representation that is amenable to non-rigid deformation. We model similarity between interactions using ITF, while for interaction analogy, we transform the ITF, either rigidly or non-rigidly, to guide the feature matching to the reposing and deformation of the anchor object. Qualitative and quantitative experiments show that our ITF-guided deformable interaction analogy works surprisingly well even with simple distance features compared to variants of state-of-the-art methods that utilize more sophisticated interaction representations and feature learning from large datasets.</p></div>\",\"PeriodicalId\":55083,\"journal\":{\"name\":\"Graphical Models\",\"volume\":\"133 \",\"pages\":\"Article 101217\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2024-06-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S1524070324000055/pdfft?md5=94513ad40e92d864add74b24ff48c5e2&pid=1-s2.0-S1524070324000055-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Graphical Models\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S1524070324000055\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/3/20 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, SOFTWARE ENGINEERING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Graphical Models","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1524070324000055","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/3/20 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
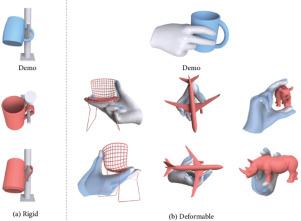
We introduce deformable interaction analogy (DINA) as a means to generate close interactions between two 3D objects. Given a single demo interaction between an anchor object (e.g. a hand) and a source object (e.g. a mug grasped by the hand), our goal is to generate many analogous 3D interactions between the same anchor object and various new target objects (e.g. a toy airplane), where the anchor object is allowed to be rigid or deformable. To this end, we optimize the pose or shape of the anchor object to adapt it to a new target object to mimic the demo. To facilitate the optimization, we advocate using interaction interface (ITF), defined by a set of points sampled on the anchor object, as a descriptive and robust interaction representation that is amenable to non-rigid deformation. We model similarity between interactions using ITF, while for interaction analogy, we transform the ITF, either rigidly or non-rigidly, to guide the feature matching to the reposing and deformation of the anchor object. Qualitative and quantitative experiments show that our ITF-guided deformable interaction analogy works surprisingly well even with simple distance features compared to variants of state-of-the-art methods that utilize more sophisticated interaction representations and feature learning from large datasets.
期刊介绍:
Graphical Models is recognized internationally as a highly rated, top tier journal and is focused on the creation, geometric processing, animation, and visualization of graphical models and on their applications in engineering, science, culture, and entertainment. GMOD provides its readers with thoroughly reviewed and carefully selected papers that disseminate exciting innovations, that teach rigorous theoretical foundations, that propose robust and efficient solutions, or that describe ambitious systems or applications in a variety of topics.
We invite papers in five categories: research (contributions of novel theoretical or practical approaches or solutions), survey (opinionated views of the state-of-the-art and challenges in a specific topic), system (the architecture and implementation details of an innovative architecture for a complete system that supports model/animation design, acquisition, analysis, visualization?), application (description of a novel application of know techniques and evaluation of its impact), or lecture (an elegant and inspiring perspective on previously published results that clarifies them and teaches them in a new way).
GMOD offers its authors an accelerated review, feedback from experts in the field, immediate online publication of accepted papers, no restriction on color and length (when justified by the content) in the online version, and a broad promotion of published papers. A prestigious group of editors selected from among the premier international researchers in their fields oversees the review process.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
