Xue-Fang Wang, Wen-Hua Chen, Jingjing Jiang, Yunda Yan
{"title":"自主超车的高层决策:基于 MPC 的切换控制方法","authors":"Xue-Fang Wang, Wen-Hua Chen, Jingjing Jiang, Yunda Yan","doi":"10.1049/itr2.12507","DOIUrl":null,"url":null,"abstract":"<p>The key motivation of this paper lies in the development of a high-level decision-making framework for autonomous\novertaking maneuvers on two-lane country roads with dynamic oncoming traffic. To generate an optimal and safe decision\nsequence for such scenario, an innovative high-level decision-making framework that combines model predictive control (MPC) and switching control methodologies is introduced. Specifically, the autonomous vehicle is abstracted and modelled as a switched system. This abstraction allows vehicle to operate in different modes corresponding to different high-level decisions. It establishes a crucial connection between high-level decision-making and low-level behaviour of the autonomous vehicle. Furthermore, barrier functions and predictive models that account for the relationship between the autonomous vehicle and oncoming traffic are incorporated. This technique enables us to guarantee the satisfaction of constraints, while also assessing performance within a prediction horizon. By repeatedly solving the online constrained optimization problems, we not only generate an optimal decision sequence for overtaking safely and efficiently but also enhance the adaptability and robustness. This adaptability allows the system to respond effectively to potential changes and unexpected events. Finally, the performance of the proposed MPC framework is demonstrated via simulations of four driving scenarios, which shows that it can handle multiple behaviours.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 7","pages":"1259-1271"},"PeriodicalIF":2.5000,"publicationDate":"2024-03-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12507","citationCount":"0","resultStr":"{\"title\":\"High-level decision-making for autonomous overtaking: An MPC-based switching control approach\",\"authors\":\"Xue-Fang Wang, Wen-Hua Chen, Jingjing Jiang, Yunda Yan\",\"doi\":\"10.1049/itr2.12507\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The key motivation of this paper lies in the development of a high-level decision-making framework for autonomous\\novertaking maneuvers on two-lane country roads with dynamic oncoming traffic. To generate an optimal and safe decision\\nsequence for such scenario, an innovative high-level decision-making framework that combines model predictive control (MPC) and switching control methodologies is introduced. Specifically, the autonomous vehicle is abstracted and modelled as a switched system. This abstraction allows vehicle to operate in different modes corresponding to different high-level decisions. It establishes a crucial connection between high-level decision-making and low-level behaviour of the autonomous vehicle. Furthermore, barrier functions and predictive models that account for the relationship between the autonomous vehicle and oncoming traffic are incorporated. This technique enables us to guarantee the satisfaction of constraints, while also assessing performance within a prediction horizon. By repeatedly solving the online constrained optimization problems, we not only generate an optimal decision sequence for overtaking safely and efficiently but also enhance the adaptability and robustness. This adaptability allows the system to respond effectively to potential changes and unexpected events. Finally, the performance of the proposed MPC framework is demonstrated via simulations of four driving scenarios, which shows that it can handle multiple behaviours.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 7\",\"pages\":\"1259-1271\"},\"PeriodicalIF\":2.5000,\"publicationDate\":\"2024-03-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12507\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12507\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12507","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
High-level decision-making for autonomous overtaking: An MPC-based switching control approach
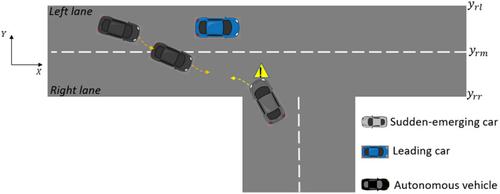
The key motivation of this paper lies in the development of a high-level decision-making framework for autonomous
overtaking maneuvers on two-lane country roads with dynamic oncoming traffic. To generate an optimal and safe decision
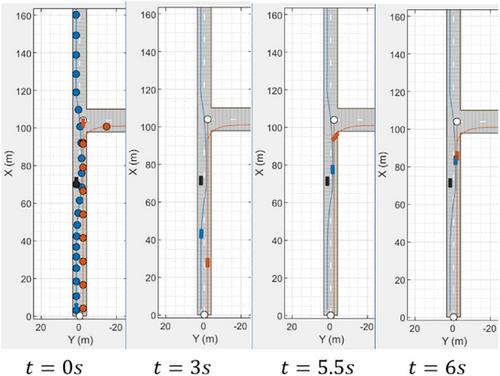
sequence for such scenario, an innovative high-level decision-making framework that combines model predictive control (MPC) and switching control methodologies is introduced. Specifically, the autonomous vehicle is abstracted and modelled as a switched system. This abstraction allows vehicle to operate in different modes corresponding to different high-level decisions. It establishes a crucial connection between high-level decision-making and low-level behaviour of the autonomous vehicle. Furthermore, barrier functions and predictive models that account for the relationship between the autonomous vehicle and oncoming traffic are incorporated. This technique enables us to guarantee the satisfaction of constraints, while also assessing performance within a prediction horizon. By repeatedly solving the online constrained optimization problems, we not only generate an optimal decision sequence for overtaking safely and efficiently but also enhance the adaptability and robustness. This adaptability allows the system to respond effectively to potential changes and unexpected events. Finally, the performance of the proposed MPC framework is demonstrated via simulations of four driving scenarios, which shows that it can handle multiple behaviours.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
