Johannes Kühn, Tingli Hu, Alexander Tödtheide, Edmundo Pozo Fortunić, Elisabeth Jensen, Sami Haddadin
{"title":"无缝肢体驱动假肢的协同互补控制方法","authors":"Johannes Kühn, Tingli Hu, Alexander Tödtheide, Edmundo Pozo Fortunić, Elisabeth Jensen, Sami Haddadin","doi":"10.1038/s42256-024-00825-7","DOIUrl":null,"url":null,"abstract":"Limb-driven control allows for direct control by using residual limb movements rather than unnatural and complex muscle activation. Existing limb-driven methods simultaneously learn a variety of possible motions, ranging from a residual limb to entire arm motions, from human templates by relying on linear or nonlinear regression techniques. However, the map between a low-dimensional residual limb movement and high-dimensional total limb movement is highly underdetermined. Therefore, this complex, high-dimensional coordination problem cannot be accurately solved by treating it as a data-driven black box problem. Here we address this challenge by introducing the residual limb-driven control framework synergy complement control. Firstly, the residual limb drives a one-dimensional phase variable to simultaneously control the multiple joints of the prosthesis. Secondly, the resulting prosthesis motion naturally complements the movement of the residual limb by its synergy components. Furthermore, our framework adds information on contextual tasks and goals and allows for seamless transitions between these. Experimental validation was conducted using subjects with preserved arms employing an exo-prosthesis setup, and studies involving participants with and without limb differences in a virtual reality setup. The findings affirm that the restoration of lost coordinated synergy capabilities is reliably achieved through the utilization of synergy complement control with the prosthesis. Current limb-driven methods often result in suboptimal prosthetic motions. Kühn and colleagues develop a framework called synergy complement control (SCC) that advances prosthetics by learning ‘cyborg’ limb-driven control, ensuring natural coordination. Validated in diverse trials, SCC offers reliable and intuitive enhancement for limb functionality.","PeriodicalId":48533,"journal":{"name":"Nature Machine Intelligence","volume":"6 4","pages":"481-492"},"PeriodicalIF":23.9000,"publicationDate":"2024-04-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s42256-024-00825-7.pdf","citationCount":"0","resultStr":"{\"title\":\"The synergy complement control approach for seamless limb-driven prostheses\",\"authors\":\"Johannes Kühn, Tingli Hu, Alexander Tödtheide, Edmundo Pozo Fortunić, Elisabeth Jensen, Sami Haddadin\",\"doi\":\"10.1038/s42256-024-00825-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Limb-driven control allows for direct control by using residual limb movements rather than unnatural and complex muscle activation. Existing limb-driven methods simultaneously learn a variety of possible motions, ranging from a residual limb to entire arm motions, from human templates by relying on linear or nonlinear regression techniques. However, the map between a low-dimensional residual limb movement and high-dimensional total limb movement is highly underdetermined. Therefore, this complex, high-dimensional coordination problem cannot be accurately solved by treating it as a data-driven black box problem. Here we address this challenge by introducing the residual limb-driven control framework synergy complement control. Firstly, the residual limb drives a one-dimensional phase variable to simultaneously control the multiple joints of the prosthesis. Secondly, the resulting prosthesis motion naturally complements the movement of the residual limb by its synergy components. Furthermore, our framework adds information on contextual tasks and goals and allows for seamless transitions between these. Experimental validation was conducted using subjects with preserved arms employing an exo-prosthesis setup, and studies involving participants with and without limb differences in a virtual reality setup. The findings affirm that the restoration of lost coordinated synergy capabilities is reliably achieved through the utilization of synergy complement control with the prosthesis. Current limb-driven methods often result in suboptimal prosthetic motions. Kühn and colleagues develop a framework called synergy complement control (SCC) that advances prosthetics by learning ‘cyborg’ limb-driven control, ensuring natural coordination. Validated in diverse trials, SCC offers reliable and intuitive enhancement for limb functionality.\",\"PeriodicalId\":48533,\"journal\":{\"name\":\"Nature Machine Intelligence\",\"volume\":\"6 4\",\"pages\":\"481-492\"},\"PeriodicalIF\":23.9000,\"publicationDate\":\"2024-04-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.nature.com/articles/s42256-024-00825-7.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Machine Intelligence\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.nature.com/articles/s42256-024-00825-7\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Machine Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.nature.com/articles/s42256-024-00825-7","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
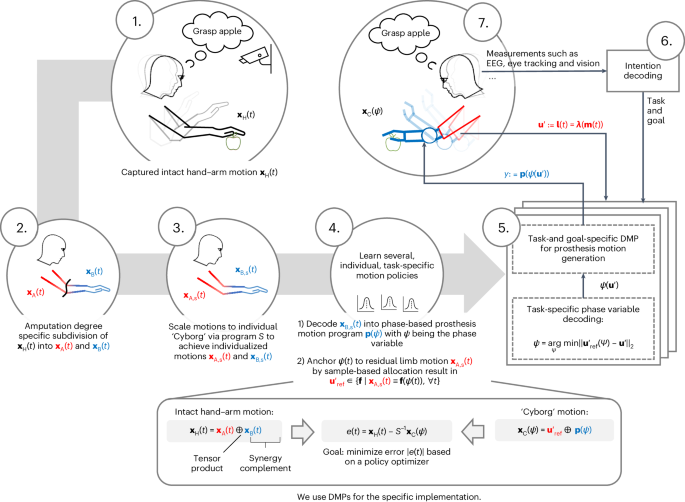
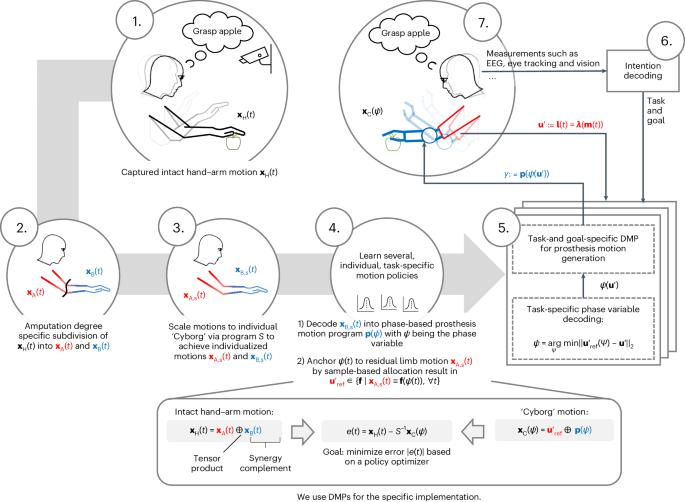
The synergy complement control approach for seamless limb-driven prostheses
Limb-driven control allows for direct control by using residual limb movements rather than unnatural and complex muscle activation. Existing limb-driven methods simultaneously learn a variety of possible motions, ranging from a residual limb to entire arm motions, from human templates by relying on linear or nonlinear regression techniques. However, the map between a low-dimensional residual limb movement and high-dimensional total limb movement is highly underdetermined. Therefore, this complex, high-dimensional coordination problem cannot be accurately solved by treating it as a data-driven black box problem. Here we address this challenge by introducing the residual limb-driven control framework synergy complement control. Firstly, the residual limb drives a one-dimensional phase variable to simultaneously control the multiple joints of the prosthesis. Secondly, the resulting prosthesis motion naturally complements the movement of the residual limb by its synergy components. Furthermore, our framework adds information on contextual tasks and goals and allows for seamless transitions between these. Experimental validation was conducted using subjects with preserved arms employing an exo-prosthesis setup, and studies involving participants with and without limb differences in a virtual reality setup. The findings affirm that the restoration of lost coordinated synergy capabilities is reliably achieved through the utilization of synergy complement control with the prosthesis. Current limb-driven methods often result in suboptimal prosthetic motions. Kühn and colleagues develop a framework called synergy complement control (SCC) that advances prosthetics by learning ‘cyborg’ limb-driven control, ensuring natural coordination. Validated in diverse trials, SCC offers reliable and intuitive enhancement for limb functionality.
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
