{"title":"利用基于可变扰动观测器的策略控制四旋翼无人飞行器","authors":"Hoijo Jeong, Jinyoung Suk, Seungkeun Kim","doi":"10.1016/j.conengprac.2024.105990","DOIUrl":null,"url":null,"abstract":"<div><p>Disturbance observer-based control is widely employed in control systems. It demonstrates the ability to estimate intricate disturbances for subsequent measurement, thereby enabling their compensation in the output of existing controllers. Nevertheless, disturbance observer-based control shows limited robustness when utilizing a fixed nominal model. Simultaneously, the fixed time constant of the Q-filter prevents the securement of filtering performance across various flight speed areas. This study aims to enhance robustness in both open- and closed-loop disturbance observer-based control by carefully selecting the Q-filter time constant through a comprehensive transfer function analysis. The transfer function characterizing the quadrotor unmanned aerial vehicle is derived from highly reliable dynamic modeling obtained through wind-tunnel testing, with the nominal model computed by the flight speed. We propose variable disturbance observer-based control by using a nominal model according to flight speed and selecting the Q-filter of disturbance observer-based control by considering the characteristics of the dynamic model, disturbance, and sensor noise. Numerical simulations and flight tests are conducted to compare the controller’s performance, focusing specifically on attitude tracking during a round-trip flight with a slung load.</p></div>","PeriodicalId":50615,"journal":{"name":"Control Engineering Practice","volume":"150 ","pages":"Article 105990"},"PeriodicalIF":5.3000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Control of quadrotor UAV using variable disturbance observer-based strategy\",\"authors\":\"Hoijo Jeong, Jinyoung Suk, Seungkeun Kim\",\"doi\":\"10.1016/j.conengprac.2024.105990\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Disturbance observer-based control is widely employed in control systems. It demonstrates the ability to estimate intricate disturbances for subsequent measurement, thereby enabling their compensation in the output of existing controllers. Nevertheless, disturbance observer-based control shows limited robustness when utilizing a fixed nominal model. Simultaneously, the fixed time constant of the Q-filter prevents the securement of filtering performance across various flight speed areas. This study aims to enhance robustness in both open- and closed-loop disturbance observer-based control by carefully selecting the Q-filter time constant through a comprehensive transfer function analysis. The transfer function characterizing the quadrotor unmanned aerial vehicle is derived from highly reliable dynamic modeling obtained through wind-tunnel testing, with the nominal model computed by the flight speed. We propose variable disturbance observer-based control by using a nominal model according to flight speed and selecting the Q-filter of disturbance observer-based control by considering the characteristics of the dynamic model, disturbance, and sensor noise. Numerical simulations and flight tests are conducted to compare the controller’s performance, focusing specifically on attitude tracking during a round-trip flight with a slung load.</p></div>\",\"PeriodicalId\":50615,\"journal\":{\"name\":\"Control Engineering Practice\",\"volume\":\"150 \",\"pages\":\"Article 105990\"},\"PeriodicalIF\":5.3000,\"publicationDate\":\"2024-09-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Control Engineering Practice\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0967066124001503\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/6/9 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Control Engineering Practice","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0967066124001503","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/6/9 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Control of quadrotor UAV using variable disturbance observer-based strategy
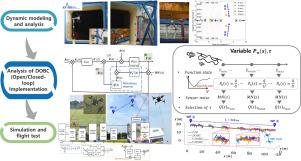
Disturbance observer-based control is widely employed in control systems. It demonstrates the ability to estimate intricate disturbances for subsequent measurement, thereby enabling their compensation in the output of existing controllers. Nevertheless, disturbance observer-based control shows limited robustness when utilizing a fixed nominal model. Simultaneously, the fixed time constant of the Q-filter prevents the securement of filtering performance across various flight speed areas. This study aims to enhance robustness in both open- and closed-loop disturbance observer-based control by carefully selecting the Q-filter time constant through a comprehensive transfer function analysis. The transfer function characterizing the quadrotor unmanned aerial vehicle is derived from highly reliable dynamic modeling obtained through wind-tunnel testing, with the nominal model computed by the flight speed. We propose variable disturbance observer-based control by using a nominal model according to flight speed and selecting the Q-filter of disturbance observer-based control by considering the characteristics of the dynamic model, disturbance, and sensor noise. Numerical simulations and flight tests are conducted to compare the controller’s performance, focusing specifically on attitude tracking during a round-trip flight with a slung load.
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
