{"title":"基于舒适区边界的自动紧急制动算法对中国汽车与电动两轮车碰撞事故的评估","authors":"Xiaomi Yang, Nils Lubbe, Jonas Bärgman","doi":"10.1049/itr2.12532","DOIUrl":null,"url":null,"abstract":"<p>Crashes between cars and powered two-wheelers (PTWs: motorcycles, scooters, and e-bikes) are a safety concern; as a result, developing car safety systems that protect PTW riders is essential. While the pre-crash protection system automated emergency braking (AEB) has been shown to avoid and mitigate injuries for car-to-car, car-to-cyclist, and car-to-pedestrian crashes, much is still unknown about its effectiveness in car-to-PTW crashes. Further, the characteristics of the crashes that remain after the introduction of such systems in traffic are also largely unknown. This study estimates the crash avoidance and injury risk reduction performance of six different PTW-AEB algorithms that were virtually applied to reconstructed car-to-PTW pre-crash kinematics extracted from a Chinese in-depth crash database. Five of the algorithms include combinations of drivers’ and PTW riders’ comfort zone boundaries for braking and steering, while the sixth is a traditional AEB. Results show that the average safety performance of the algorithms using only the driver's comfort zone boundaries is higher than that of the traditional AEB algorithm. All algorithms resulted in similar distributions of impact speed and impact locations, which means that in-crash protection systems likely can be made less complex, not having to consider differences in AEB algorithm design among car manufacturers.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 9","pages":"1599-1615"},"PeriodicalIF":2.5000,"publicationDate":"2024-07-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12532","citationCount":"0","resultStr":"{\"title\":\"Evaluation of comfort zone boundary based automated emergency braking algorithms for car-to-powered-two-wheeler crashes in China\",\"authors\":\"Xiaomi Yang, Nils Lubbe, Jonas Bärgman\",\"doi\":\"10.1049/itr2.12532\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Crashes between cars and powered two-wheelers (PTWs: motorcycles, scooters, and e-bikes) are a safety concern; as a result, developing car safety systems that protect PTW riders is essential. While the pre-crash protection system automated emergency braking (AEB) has been shown to avoid and mitigate injuries for car-to-car, car-to-cyclist, and car-to-pedestrian crashes, much is still unknown about its effectiveness in car-to-PTW crashes. Further, the characteristics of the crashes that remain after the introduction of such systems in traffic are also largely unknown. This study estimates the crash avoidance and injury risk reduction performance of six different PTW-AEB algorithms that were virtually applied to reconstructed car-to-PTW pre-crash kinematics extracted from a Chinese in-depth crash database. Five of the algorithms include combinations of drivers’ and PTW riders’ comfort zone boundaries for braking and steering, while the sixth is a traditional AEB. Results show that the average safety performance of the algorithms using only the driver's comfort zone boundaries is higher than that of the traditional AEB algorithm. All algorithms resulted in similar distributions of impact speed and impact locations, which means that in-crash protection systems likely can be made less complex, not having to consider differences in AEB algorithm design among car manufacturers.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 9\",\"pages\":\"1599-1615\"},\"PeriodicalIF\":2.5000,\"publicationDate\":\"2024-07-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12532\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12532\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12532","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Evaluation of comfort zone boundary based automated emergency braking algorithms for car-to-powered-two-wheeler crashes in China
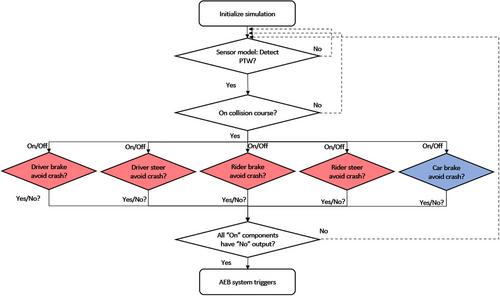
Crashes between cars and powered two-wheelers (PTWs: motorcycles, scooters, and e-bikes) are a safety concern; as a result, developing car safety systems that protect PTW riders is essential. While the pre-crash protection system automated emergency braking (AEB) has been shown to avoid and mitigate injuries for car-to-car, car-to-cyclist, and car-to-pedestrian crashes, much is still unknown about its effectiveness in car-to-PTW crashes. Further, the characteristics of the crashes that remain after the introduction of such systems in traffic are also largely unknown. This study estimates the crash avoidance and injury risk reduction performance of six different PTW-AEB algorithms that were virtually applied to reconstructed car-to-PTW pre-crash kinematics extracted from a Chinese in-depth crash database. Five of the algorithms include combinations of drivers’ and PTW riders’ comfort zone boundaries for braking and steering, while the sixth is a traditional AEB. Results show that the average safety performance of the algorithms using only the driver's comfort zone boundaries is higher than that of the traditional AEB algorithm. All algorithms resulted in similar distributions of impact speed and impact locations, which means that in-crash protection systems likely can be made less complex, not having to consider differences in AEB algorithm design among car manufacturers.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
