{"title":"基于模拟的自动驾驶汽车对城市网络的影响评估","authors":"Hashmatullah Sadid, Constantinos Antoniou","doi":"10.1049/itr2.12537","DOIUrl":null,"url":null,"abstract":"<p>The behavioural differences between autonomous vehicles (AVs) and human-driven vehicles (HDVs) can significantly impact traffic efficiency, safety, and emissions. Simulation-based impact assessments using microscopic traffic models often modify car-following (CF) and lane-changing (LC) configurations to differentiate AVs from HDVs. Typically, researchers adjust CF model parameters to replicate AV driving behaviour, but these assumptions can lead to varying conclusions on AV impacts. The scope of each study (e.g., freeways, highways, urban links, intersections) also influences the outcomes. This research conducts an impact assessment utilizing optimized AV driving behavior rather than assumptions on a city network level (Munich) using a simulation-based platform. The particle swarm optimization (PSO) algorithm is used to calibrate the base model and run simulation experiments under various penetration rates (PRs) and demand scenarios. Results show significant safety improvements throughout the network under higher PRs, while lower PRs might lead to deteriorating safety. At 100% AV PR, the total number of conflicts decreased by around 25% compared to a fully HDV environment. Considering AVs' sensing capabilities, additional safety improvements are found in almost any AV PR. However, AVs might not improve traffic efficiency; in some cases, they may slightly increase average network travel time, though this change is minimal.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 9","pages":"1677-1696"},"PeriodicalIF":2.5000,"publicationDate":"2024-07-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12537","citationCount":"0","resultStr":"{\"title\":\"A simulation-based impact assessment of autonomous vehicles in urban networks\",\"authors\":\"Hashmatullah Sadid, Constantinos Antoniou\",\"doi\":\"10.1049/itr2.12537\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The behavioural differences between autonomous vehicles (AVs) and human-driven vehicles (HDVs) can significantly impact traffic efficiency, safety, and emissions. Simulation-based impact assessments using microscopic traffic models often modify car-following (CF) and lane-changing (LC) configurations to differentiate AVs from HDVs. Typically, researchers adjust CF model parameters to replicate AV driving behaviour, but these assumptions can lead to varying conclusions on AV impacts. The scope of each study (e.g., freeways, highways, urban links, intersections) also influences the outcomes. This research conducts an impact assessment utilizing optimized AV driving behavior rather than assumptions on a city network level (Munich) using a simulation-based platform. The particle swarm optimization (PSO) algorithm is used to calibrate the base model and run simulation experiments under various penetration rates (PRs) and demand scenarios. Results show significant safety improvements throughout the network under higher PRs, while lower PRs might lead to deteriorating safety. At 100% AV PR, the total number of conflicts decreased by around 25% compared to a fully HDV environment. Considering AVs' sensing capabilities, additional safety improvements are found in almost any AV PR. However, AVs might not improve traffic efficiency; in some cases, they may slightly increase average network travel time, though this change is minimal.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 9\",\"pages\":\"1677-1696\"},\"PeriodicalIF\":2.5000,\"publicationDate\":\"2024-07-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12537\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12537\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12537","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
摘要
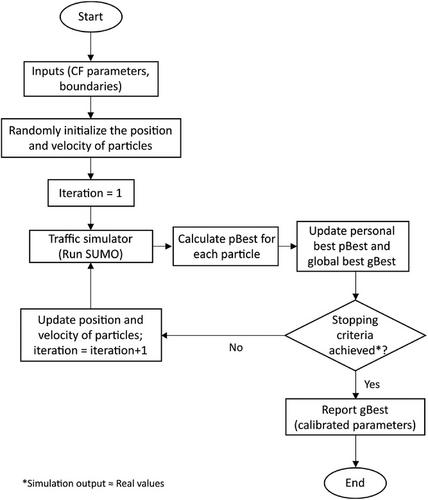
自动驾驶车辆(AV)与人类驾驶车辆(HDV)之间的行为差异会对交通效率、安全和排放产生重大影响。使用微观交通模型进行的基于仿真的影响评估通常会修改跟车(CF)和变道(LC)配置,以区分 AV 和 HDV。通常情况下,研究人员会调整CF模型参数,以复制自动驾驶汽车的驾驶行为,但这些假设会导致对自动驾驶汽车影响的不同结论。每项研究的范围(如高速公路、高等级公路、城市连接线、交叉路口)也会影响研究结果。本研究利用基于模拟的平台,在城市网络层面(慕尼黑)利用优化的自动驾驶汽车驾驶行为而非假设进行影响评估。粒子群优化(PSO)算法用于校准基础模型,并在各种渗透率(PR)和需求情景下进行模拟实验。结果表明,在渗透率较高的情况下,整个网络的安全性明显提高,而在渗透率较低的情况下,安全性可能会下降。与全高清车环境相比,在 100%的自动驾驶普及率下,冲突总数减少了约 25%。考虑到自动驾驶汽车的感知能力,几乎任何自动驾驶汽车 PR 都能提高安全性。不过,自动驾驶汽车可能不会提高交通效率;在某些情况下,它们可能会略微增加网络的平均行车时间,尽管这种变化微乎其微。
A simulation-based impact assessment of autonomous vehicles in urban networks
The behavioural differences between autonomous vehicles (AVs) and human-driven vehicles (HDVs) can significantly impact traffic efficiency, safety, and emissions. Simulation-based impact assessments using microscopic traffic models often modify car-following (CF) and lane-changing (LC) configurations to differentiate AVs from HDVs. Typically, researchers adjust CF model parameters to replicate AV driving behaviour, but these assumptions can lead to varying conclusions on AV impacts. The scope of each study (e.g., freeways, highways, urban links, intersections) also influences the outcomes. This research conducts an impact assessment utilizing optimized AV driving behavior rather than assumptions on a city network level (Munich) using a simulation-based platform. The particle swarm optimization (PSO) algorithm is used to calibrate the base model and run simulation experiments under various penetration rates (PRs) and demand scenarios. Results show significant safety improvements throughout the network under higher PRs, while lower PRs might lead to deteriorating safety. At 100% AV PR, the total number of conflicts decreased by around 25% compared to a fully HDV environment. Considering AVs' sensing capabilities, additional safety improvements are found in almost any AV PR. However, AVs might not improve traffic efficiency; in some cases, they may slightly increase average network travel time, though this change is minimal.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
