Jinsuk Choi , Wookyong Kwon , Young Sam Lee , Soohee Han
{"title":"应用于机器人机械手的自适应时延估计误差补偿","authors":"Jinsuk Choi , Wookyong Kwon , Young Sam Lee , Soohee Han","doi":"10.1016/j.conengprac.2024.106029","DOIUrl":null,"url":null,"abstract":"<div><p>This paper introduces an adaptive time-delay estimation error compensation (ATDE2C) scheme that strategically reduces the difficult-to-predict tracking errors of time-delay control (TDC) for given reference trajectories. Specially, these tracking errors mainly come from the so-called TDE errors caused by one-sample delayed measurements associated with a time delay estimation (TDE) technique in TDC. ATDE2C enhances robustness of TDC against such inevitable TDE errors using a disturbance observer (DOB)-based approach, thereby enlarging the stable operational region and offering a more robust performance compared to the basic TDC. The ATDE2C scheme enhances tracking performance of robot manipulators by adaptively feeding back the difference between actual and estimated TDE errors using a disturbance observer. This approach is particularly effective in managing hard nonlinearities, such as Coulomb friction, encountered in high-degree-of-freedom robots during rapid joint movements. It minimizes frictional effects and prevents overshoots, ensuring precise control. Moreover, it allows for intuitive tuning of the controller through parameters focused on convergence speed, making it practical for application compared to existing controllers. Extensive testing, including simulations and experiments, confirms improved performance of ATDE2C in real-world applications.</p></div>","PeriodicalId":50615,"journal":{"name":"Control Engineering Practice","volume":"151 ","pages":"Article 106029"},"PeriodicalIF":4.6000,"publicationDate":"2024-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Adaptive time-delay estimation error compensation for application to robot manipulators\",\"authors\":\"Jinsuk Choi , Wookyong Kwon , Young Sam Lee , Soohee Han\",\"doi\":\"10.1016/j.conengprac.2024.106029\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>This paper introduces an adaptive time-delay estimation error compensation (ATDE2C) scheme that strategically reduces the difficult-to-predict tracking errors of time-delay control (TDC) for given reference trajectories. Specially, these tracking errors mainly come from the so-called TDE errors caused by one-sample delayed measurements associated with a time delay estimation (TDE) technique in TDC. ATDE2C enhances robustness of TDC against such inevitable TDE errors using a disturbance observer (DOB)-based approach, thereby enlarging the stable operational region and offering a more robust performance compared to the basic TDC. The ATDE2C scheme enhances tracking performance of robot manipulators by adaptively feeding back the difference between actual and estimated TDE errors using a disturbance observer. This approach is particularly effective in managing hard nonlinearities, such as Coulomb friction, encountered in high-degree-of-freedom robots during rapid joint movements. It minimizes frictional effects and prevents overshoots, ensuring precise control. Moreover, it allows for intuitive tuning of the controller through parameters focused on convergence speed, making it practical for application compared to existing controllers. Extensive testing, including simulations and experiments, confirms improved performance of ATDE2C in real-world applications.</p></div>\",\"PeriodicalId\":50615,\"journal\":{\"name\":\"Control Engineering Practice\",\"volume\":\"151 \",\"pages\":\"Article 106029\"},\"PeriodicalIF\":4.6000,\"publicationDate\":\"2024-10-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Control Engineering Practice\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0967066124001886\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/7/24 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Control Engineering Practice","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0967066124001886","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/7/24 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Adaptive time-delay estimation error compensation for application to robot manipulators
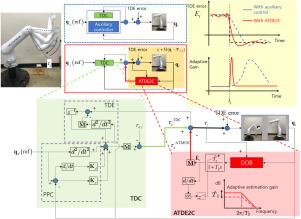
This paper introduces an adaptive time-delay estimation error compensation (ATDE2C) scheme that strategically reduces the difficult-to-predict tracking errors of time-delay control (TDC) for given reference trajectories. Specially, these tracking errors mainly come from the so-called TDE errors caused by one-sample delayed measurements associated with a time delay estimation (TDE) technique in TDC. ATDE2C enhances robustness of TDC against such inevitable TDE errors using a disturbance observer (DOB)-based approach, thereby enlarging the stable operational region and offering a more robust performance compared to the basic TDC. The ATDE2C scheme enhances tracking performance of robot manipulators by adaptively feeding back the difference between actual and estimated TDE errors using a disturbance observer. This approach is particularly effective in managing hard nonlinearities, such as Coulomb friction, encountered in high-degree-of-freedom robots during rapid joint movements. It minimizes frictional effects and prevents overshoots, ensuring precise control. Moreover, it allows for intuitive tuning of the controller through parameters focused on convergence speed, making it practical for application compared to existing controllers. Extensive testing, including simulations and experiments, confirms improved performance of ATDE2C in real-world applications.
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
