Lei Zhou , Shouxiang Jin , Jinpeng Wang , Huichun Zhang , Minghong Shi , HongPing Zhou
{"title":"油茶果实采集点的 3D 定位,用于机器人采摘","authors":"Lei Zhou , Shouxiang Jin , Jinpeng Wang , Huichun Zhang , Minghong Shi , HongPing Zhou","doi":"10.1016/j.biosystemseng.2024.07.019","DOIUrl":null,"url":null,"abstract":"<div><p><em>Camellia oleifera</em> is an oilseed crop with high economic value. The short optimum harvest period and high labour costs of <em>C. oleifera</em> harvesting have prompted research on intelligent robotic harvesting. This study focused on the determination of grabbing points for the robotic harvesting of <em>C. oleifera</em> fruits, providing a basis for the decision making of the fruit-picking robot. A relatively simple 2D convolutional neural network (CNN) and stereoscopic vision replaced the complex 3D CNN to realise the 3D positioning of the fruit. Apple datasets were used for the pretraining of the model and knowledge transfer, which shared a certain degree of similarity to <em>C. oleifera</em> fruit. In addition, a fully automatic coordinate conversion method has been proposed to transform the fruit position information in the image into its 3D position in the robot coordinate system. Results showed that the You Only Look Once (YOLO)v8x model trained using 1012 annotated samples achieved the highest performance for fruit detection, with mAP<sub>50</sub> of 0.96 on the testing dataset. With knowledge transfer based on the apple datasets, YOLOv8x using few-shot learning realised a testing mAP<sub>50</sub> of 0.95, reducing manual annotation. Moreover, the error in the 3D coordinate calculation was lower than 2.1 cm on the three axes. The proposed method provides the 3D coordinates of the grabbing point for the target fruit in the robot coordinate system, which can be transferred directly to the robot control system to execute fruit-picking actions. This dataset was published online to reproduce the results of this study.</p></div>","PeriodicalId":9173,"journal":{"name":"Biosystems Engineering","volume":"246 ","pages":"Pages 110-121"},"PeriodicalIF":5.3000,"publicationDate":"2024-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"3D positioning of Camellia oleifera fruit-grabbing points for robotic harvesting\",\"authors\":\"Lei Zhou , Shouxiang Jin , Jinpeng Wang , Huichun Zhang , Minghong Shi , HongPing Zhou\",\"doi\":\"10.1016/j.biosystemseng.2024.07.019\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p><em>Camellia oleifera</em> is an oilseed crop with high economic value. The short optimum harvest period and high labour costs of <em>C. oleifera</em> harvesting have prompted research on intelligent robotic harvesting. This study focused on the determination of grabbing points for the robotic harvesting of <em>C. oleifera</em> fruits, providing a basis for the decision making of the fruit-picking robot. A relatively simple 2D convolutional neural network (CNN) and stereoscopic vision replaced the complex 3D CNN to realise the 3D positioning of the fruit. Apple datasets were used for the pretraining of the model and knowledge transfer, which shared a certain degree of similarity to <em>C. oleifera</em> fruit. In addition, a fully automatic coordinate conversion method has been proposed to transform the fruit position information in the image into its 3D position in the robot coordinate system. Results showed that the You Only Look Once (YOLO)v8x model trained using 1012 annotated samples achieved the highest performance for fruit detection, with mAP<sub>50</sub> of 0.96 on the testing dataset. With knowledge transfer based on the apple datasets, YOLOv8x using few-shot learning realised a testing mAP<sub>50</sub> of 0.95, reducing manual annotation. Moreover, the error in the 3D coordinate calculation was lower than 2.1 cm on the three axes. The proposed method provides the 3D coordinates of the grabbing point for the target fruit in the robot coordinate system, which can be transferred directly to the robot control system to execute fruit-picking actions. This dataset was published online to reproduce the results of this study.</p></div>\",\"PeriodicalId\":9173,\"journal\":{\"name\":\"Biosystems Engineering\",\"volume\":\"246 \",\"pages\":\"Pages 110-121\"},\"PeriodicalIF\":5.3000,\"publicationDate\":\"2024-10-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biosystems Engineering\",\"FirstCategoryId\":\"97\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S1537511024001727\",\"RegionNum\":1,\"RegionCategory\":\"农林科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/7/30 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"AGRICULTURAL ENGINEERING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biosystems Engineering","FirstCategoryId":"97","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1537511024001727","RegionNum":1,"RegionCategory":"农林科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/7/30 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AGRICULTURAL ENGINEERING","Score":null,"Total":0}
引用次数: 0
摘要
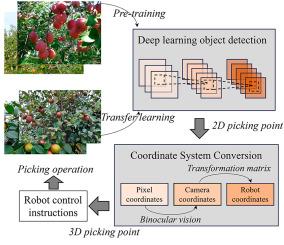
油茶是一种经济价值很高的油料作物。油茶收获的最佳收获期短,劳动力成本高,这促使人们对智能机器人收获进行研究。本研究的重点是确定油菜果实机器人收获的抓取点,为摘果机器人的决策提供依据。相对简单的二维卷积神经网络(CNN)和立体视觉取代了复杂的三维 CNN,实现了水果的三维定位。模型的预训练和知识转移使用了苹果数据集,这些数据集与油橄榄果实有一定程度的相似性。此外,还提出了一种全自动坐标转换方法,将图像中的水果位置信息转换为机器人坐标系中的三维位置。结果表明,使用 1012 个注释样本训练的 You Only Look Once (YOLO)v8x 模型的水果检测性能最高,在测试数据集上的 mAP50 为 0.96。在苹果数据集的基础上进行知识转移后,YOLOv8x 利用少点学习实现了 0.95 的测试 mAP50,减少了人工标注。此外,三维坐标计算的误差在三个轴上都小于 2.1 厘米。所提出的方法在机器人坐标系中提供了目标水果抓取点的三维坐标,可直接传输到机器人控制系统中执行摘果动作。该数据集已在线发布,以再现本研究的成果。
3D positioning of Camellia oleifera fruit-grabbing points for robotic harvesting
Camellia oleifera is an oilseed crop with high economic value. The short optimum harvest period and high labour costs of C. oleifera harvesting have prompted research on intelligent robotic harvesting. This study focused on the determination of grabbing points for the robotic harvesting of C. oleifera fruits, providing a basis for the decision making of the fruit-picking robot. A relatively simple 2D convolutional neural network (CNN) and stereoscopic vision replaced the complex 3D CNN to realise the 3D positioning of the fruit. Apple datasets were used for the pretraining of the model and knowledge transfer, which shared a certain degree of similarity to C. oleifera fruit. In addition, a fully automatic coordinate conversion method has been proposed to transform the fruit position information in the image into its 3D position in the robot coordinate system. Results showed that the You Only Look Once (YOLO)v8x model trained using 1012 annotated samples achieved the highest performance for fruit detection, with mAP50 of 0.96 on the testing dataset. With knowledge transfer based on the apple datasets, YOLOv8x using few-shot learning realised a testing mAP50 of 0.95, reducing manual annotation. Moreover, the error in the 3D coordinate calculation was lower than 2.1 cm on the three axes. The proposed method provides the 3D coordinates of the grabbing point for the target fruit in the robot coordinate system, which can be transferred directly to the robot control system to execute fruit-picking actions. This dataset was published online to reproduce the results of this study.
期刊介绍:
Biosystems Engineering publishes research in engineering and the physical sciences that represent advances in understanding or modelling of the performance of biological systems for sustainable developments in land use and the environment, agriculture and amenity, bioproduction processes and the food chain. The subject matter of the journal reflects the wide range and interdisciplinary nature of research in engineering for biological systems.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
