Jingyao Bao, Hongfei Yu, Yongjia Zou, Jin Lv, Wei Liu, Yang Cao
{"title":"用于自动驾驶的具有自校正功能的自监督双目深度估计算法","authors":"Jingyao Bao, Hongfei Yu, Yongjia Zou, Jin Lv, Wei Liu, Yang Cao","doi":"10.1049/itr2.12522","DOIUrl":null,"url":null,"abstract":"<p>Aiming to address the challenge where existing methods struggle to predict accurate disparities for imperfectly rectified stereo images, and that supervised training requires a considerable amount of ground truth, a self-supervised binocular depth estimation algorithm with self-rectification for autonomous driving is proposed. Firstly, a subnetwork dedicated to stereo rectification, aiming to estimate the homography between stereo images is developed. This homography facilitates the transformation of stereo image pairs, aligning their corresponding pixels horizontally. Secondly, a foundational self-supervised framework primarily centred on minimizing errors in stereo image reconstruction, combined with the generative-adversarial strategy is introduced. Finally, a vertical offset prediction module (VOPM) is incorporated into the basic framework to further enhance the resistance of the stereo matching network to pixel-level vertical offset errors. Experimental results on the public KITTI dataset for autonomous driving demonstrate the effectiveness of this approach in improving the disparity prediction performance for imperfectly rectified stereo images. Moreover, the self-supervised training framework exhibits superiority over state-of-the-art methods.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 8","pages":"1445-1458"},"PeriodicalIF":2.5000,"publicationDate":"2024-06-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12522","citationCount":"0","resultStr":"{\"title\":\"Self-supervised binocular depth estimation algorithm with self-rectification for autonomous driving\",\"authors\":\"Jingyao Bao, Hongfei Yu, Yongjia Zou, Jin Lv, Wei Liu, Yang Cao\",\"doi\":\"10.1049/itr2.12522\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Aiming to address the challenge where existing methods struggle to predict accurate disparities for imperfectly rectified stereo images, and that supervised training requires a considerable amount of ground truth, a self-supervised binocular depth estimation algorithm with self-rectification for autonomous driving is proposed. Firstly, a subnetwork dedicated to stereo rectification, aiming to estimate the homography between stereo images is developed. This homography facilitates the transformation of stereo image pairs, aligning their corresponding pixels horizontally. Secondly, a foundational self-supervised framework primarily centred on minimizing errors in stereo image reconstruction, combined with the generative-adversarial strategy is introduced. Finally, a vertical offset prediction module (VOPM) is incorporated into the basic framework to further enhance the resistance of the stereo matching network to pixel-level vertical offset errors. Experimental results on the public KITTI dataset for autonomous driving demonstrate the effectiveness of this approach in improving the disparity prediction performance for imperfectly rectified stereo images. Moreover, the self-supervised training framework exhibits superiority over state-of-the-art methods.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 8\",\"pages\":\"1445-1458\"},\"PeriodicalIF\":2.5000,\"publicationDate\":\"2024-06-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12522\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12522\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/itr2.12522","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Self-supervised binocular depth estimation algorithm with self-rectification for autonomous driving
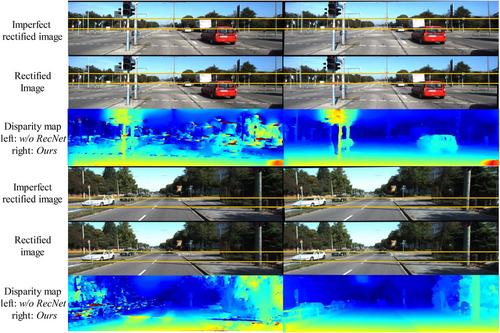
Aiming to address the challenge where existing methods struggle to predict accurate disparities for imperfectly rectified stereo images, and that supervised training requires a considerable amount of ground truth, a self-supervised binocular depth estimation algorithm with self-rectification for autonomous driving is proposed. Firstly, a subnetwork dedicated to stereo rectification, aiming to estimate the homography between stereo images is developed. This homography facilitates the transformation of stereo image pairs, aligning their corresponding pixels horizontally. Secondly, a foundational self-supervised framework primarily centred on minimizing errors in stereo image reconstruction, combined with the generative-adversarial strategy is introduced. Finally, a vertical offset prediction module (VOPM) is incorporated into the basic framework to further enhance the resistance of the stereo matching network to pixel-level vertical offset errors. Experimental results on the public KITTI dataset for autonomous driving demonstrate the effectiveness of this approach in improving the disparity prediction performance for imperfectly rectified stereo images. Moreover, the self-supervised training framework exhibits superiority over state-of-the-art methods.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
