{"title":"基于预测风险场的智能车辆运行风险评估与预警研究","authors":"Ruibin Zhang, Yingshi Guo","doi":"10.1155/2024/7504378","DOIUrl":null,"url":null,"abstract":"<div>\n <p>In order to enhance the driving safety of intelligent vehicles in complex road scenarios, a method for vehicle operation risk assessment and early warning based on the predictive risk field is proposed. The temporal feature vector composed of the spatiotemporal state characteristics of the ego vehicle and surrounding traffic participants is taken as input data for the Attention-Bidirectional Long-Short Term Memory (Attention-BiLSTM) model, which is trained to establish the desired mapping relationship. By predicting the motion state of the target vehicle and utilizing an improved risk field model based on the target vehicle of heading angle, the predictive risk field is obtained. This allows for the assessment of the ego vehicle operational risks. The risk warning model is integrated to provide risk early warning, and the safety path for the ego vehicle is planned based on the interaction between the predictive risk field equipotential lines and the cubic spline curves. Experimental results demonstrate that the proposed vehicle operation risk assessment and early warning model is effective in providing early warnings and safe path references for the ego vehicle in complex urban road test scenarios.</p>\n </div>","PeriodicalId":50259,"journal":{"name":"Journal of Advanced Transportation","volume":"2024 1","pages":""},"PeriodicalIF":2.0000,"publicationDate":"2024-07-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/7504378","citationCount":"0","resultStr":"{\"title\":\"Research on Intelligent Vehicle Operation Risk Assessment and Early Warning Based on Predictive Risk Field\",\"authors\":\"Ruibin Zhang, Yingshi Guo\",\"doi\":\"10.1155/2024/7504378\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n <p>In order to enhance the driving safety of intelligent vehicles in complex road scenarios, a method for vehicle operation risk assessment and early warning based on the predictive risk field is proposed. The temporal feature vector composed of the spatiotemporal state characteristics of the ego vehicle and surrounding traffic participants is taken as input data for the Attention-Bidirectional Long-Short Term Memory (Attention-BiLSTM) model, which is trained to establish the desired mapping relationship. By predicting the motion state of the target vehicle and utilizing an improved risk field model based on the target vehicle of heading angle, the predictive risk field is obtained. This allows for the assessment of the ego vehicle operational risks. The risk warning model is integrated to provide risk early warning, and the safety path for the ego vehicle is planned based on the interaction between the predictive risk field equipotential lines and the cubic spline curves. Experimental results demonstrate that the proposed vehicle operation risk assessment and early warning model is effective in providing early warnings and safe path references for the ego vehicle in complex urban road test scenarios.</p>\\n </div>\",\"PeriodicalId\":50259,\"journal\":{\"name\":\"Journal of Advanced Transportation\",\"volume\":\"2024 1\",\"pages\":\"\"},\"PeriodicalIF\":2.0000,\"publicationDate\":\"2024-07-31\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/7504378\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Advanced Transportation\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1155/2024/7504378\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, CIVIL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Advanced Transportation","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1155/2024/7504378","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, CIVIL","Score":null,"Total":0}
Research on Intelligent Vehicle Operation Risk Assessment and Early Warning Based on Predictive Risk Field
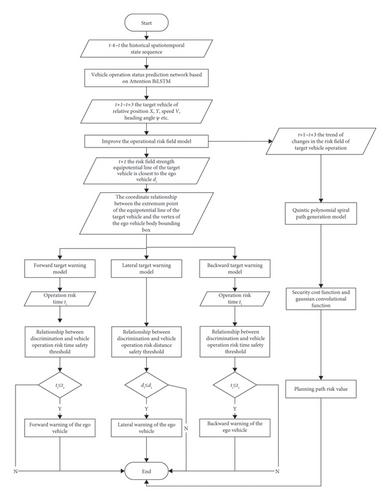
In order to enhance the driving safety of intelligent vehicles in complex road scenarios, a method for vehicle operation risk assessment and early warning based on the predictive risk field is proposed. The temporal feature vector composed of the spatiotemporal state characteristics of the ego vehicle and surrounding traffic participants is taken as input data for the Attention-Bidirectional Long-Short Term Memory (Attention-BiLSTM) model, which is trained to establish the desired mapping relationship. By predicting the motion state of the target vehicle and utilizing an improved risk field model based on the target vehicle of heading angle, the predictive risk field is obtained. This allows for the assessment of the ego vehicle operational risks. The risk warning model is integrated to provide risk early warning, and the safety path for the ego vehicle is planned based on the interaction between the predictive risk field equipotential lines and the cubic spline curves. Experimental results demonstrate that the proposed vehicle operation risk assessment and early warning model is effective in providing early warnings and safe path references for the ego vehicle in complex urban road test scenarios.
期刊介绍:
The Journal of Advanced Transportation (JAT) is a fully peer reviewed international journal in transportation research areas related to public transit, road traffic, transport networks and air transport.
It publishes theoretical and innovative papers on analysis, design, operations, optimization and planning of multi-modal transport networks, transit & traffic systems, transport technology and traffic safety. Urban rail and bus systems, Pedestrian studies, traffic flow theory and control, Intelligent Transport Systems (ITS) and automated and/or connected vehicles are some topics of interest.
Highway engineering, railway engineering and logistics do not fall within the aims and scope of JAT.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
