Junliang Chen, Dongdong Jin, Qianqian Wang, Xing Ma
{"title":"为微型软机器人编程铁磁软材料:设计、制造和应用","authors":"Junliang Chen, Dongdong Jin, Qianqian Wang, Xing Ma","doi":"10.1016/j.jmst.2024.08.049","DOIUrl":null,"url":null,"abstract":"<p>Due to the small size, active mobility, and intrinsic softness, miniature soft robots hold promising potentials in reaching the deep region inside living bodies otherwise inaccessible with compelling agility, adaptability and safety. Various materials and actuation strategies have been developed for creating soft robots, among which, ferromagnetic soft materials that self-actuate in response to external magnetic fields have attracted worldwide attention due to their remote controllability and excellent compatibility with biological tissues. This review presents comprehensive and systematic research advancements in the design, fabrication, and applications of ferromagnetic soft materials for miniature robots, providing insights into their potential use in biomedical fields and beyond. The programming strategies of ferromagnetic soft materials are summarized and classified, including mold-assisted programming, 3D printing-assisted programming, microassembly-assisted programming, and magnetization reprogramming. Each approach possesses unique advantages in manipulating the magnetic responsiveness of ferromagnetic soft materials to achieve outstanding actuation and deformation performances. We then discuss the biomedical applications of ferromagnetic soft material-based soft robots (e.g., minimally invasive surgery, targeted delivery, and tissue engineering), highlighting their potentials in revolutionizing biomedical technologies. This review also points out the current challenges and provides insights into future research directions, which we hope can serve as a useful reference for the development of next-generation adaptive miniature robots.</p>","PeriodicalId":16154,"journal":{"name":"Journal of Materials Science & Technology","volume":"27 1","pages":""},"PeriodicalIF":16.8000,"publicationDate":"2024-09-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Programming ferromagnetic soft materials for miniature soft robots: Design, fabrication, and applications\",\"authors\":\"Junliang Chen, Dongdong Jin, Qianqian Wang, Xing Ma\",\"doi\":\"10.1016/j.jmst.2024.08.049\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Due to the small size, active mobility, and intrinsic softness, miniature soft robots hold promising potentials in reaching the deep region inside living bodies otherwise inaccessible with compelling agility, adaptability and safety. Various materials and actuation strategies have been developed for creating soft robots, among which, ferromagnetic soft materials that self-actuate in response to external magnetic fields have attracted worldwide attention due to their remote controllability and excellent compatibility with biological tissues. This review presents comprehensive and systematic research advancements in the design, fabrication, and applications of ferromagnetic soft materials for miniature robots, providing insights into their potential use in biomedical fields and beyond. The programming strategies of ferromagnetic soft materials are summarized and classified, including mold-assisted programming, 3D printing-assisted programming, microassembly-assisted programming, and magnetization reprogramming. Each approach possesses unique advantages in manipulating the magnetic responsiveness of ferromagnetic soft materials to achieve outstanding actuation and deformation performances. We then discuss the biomedical applications of ferromagnetic soft material-based soft robots (e.g., minimally invasive surgery, targeted delivery, and tissue engineering), highlighting their potentials in revolutionizing biomedical technologies. This review also points out the current challenges and provides insights into future research directions, which we hope can serve as a useful reference for the development of next-generation adaptive miniature robots.</p>\",\"PeriodicalId\":16154,\"journal\":{\"name\":\"Journal of Materials Science & Technology\",\"volume\":\"27 1\",\"pages\":\"\"},\"PeriodicalIF\":16.8000,\"publicationDate\":\"2024-09-14\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Materials Science & Technology\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://doi.org/10.1016/j.jmst.2024.08.049\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MATERIALS SCIENCE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Materials Science & Technology","FirstCategoryId":"88","ListUrlMain":"https://doi.org/10.1016/j.jmst.2024.08.049","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
Programming ferromagnetic soft materials for miniature soft robots: Design, fabrication, and applications
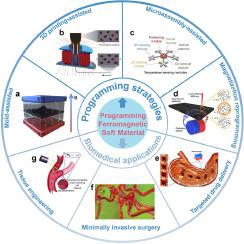
Due to the small size, active mobility, and intrinsic softness, miniature soft robots hold promising potentials in reaching the deep region inside living bodies otherwise inaccessible with compelling agility, adaptability and safety. Various materials and actuation strategies have been developed for creating soft robots, among which, ferromagnetic soft materials that self-actuate in response to external magnetic fields have attracted worldwide attention due to their remote controllability and excellent compatibility with biological tissues. This review presents comprehensive and systematic research advancements in the design, fabrication, and applications of ferromagnetic soft materials for miniature robots, providing insights into their potential use in biomedical fields and beyond. The programming strategies of ferromagnetic soft materials are summarized and classified, including mold-assisted programming, 3D printing-assisted programming, microassembly-assisted programming, and magnetization reprogramming. Each approach possesses unique advantages in manipulating the magnetic responsiveness of ferromagnetic soft materials to achieve outstanding actuation and deformation performances. We then discuss the biomedical applications of ferromagnetic soft material-based soft robots (e.g., minimally invasive surgery, targeted delivery, and tissue engineering), highlighting their potentials in revolutionizing biomedical technologies. This review also points out the current challenges and provides insights into future research directions, which we hope can serve as a useful reference for the development of next-generation adaptive miniature robots.
期刊介绍:
Journal of Materials Science & Technology strives to promote global collaboration in the field of materials science and technology. It primarily publishes original research papers, invited review articles, letters, research notes, and summaries of scientific achievements. The journal covers a wide range of materials science and technology topics, including metallic materials, inorganic nonmetallic materials, and composite materials.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
