Shiyue Zhao , Junzhi Zhang , Chengkun He , Yuan Ji , Heye Huang , Xiaohui Hou
{"title":"通过可达性引导强化学习实现紧急避撞的自主车辆极端控制","authors":"Shiyue Zhao , Junzhi Zhang , Chengkun He , Yuan Ji , Heye Huang , Xiaohui Hou","doi":"10.1016/j.aei.2024.102801","DOIUrl":null,"url":null,"abstract":"<div><p>The emergency collision avoidance capabilities of autonomous vehicles (AVs) are crucial for enhancing their active safety performance, particularly in extreme scenarios where standard methods fall short. This study introduces an Extreme Maneuver Controller (EMC) for AVs, utilizing reachability-guided reinforcement learning (RL) to address these challenging situations. By applying pseudospectral methods, we solve the minimum backward reachable tube (Min-BRT) to identify regions where conventional avoidance maneuvers are infeasible, establishing a theoretical basis for triggering extreme maneuvers. A novel controller, employing reachability-guided RL, enables vehicles to execute extreme maneuvers to escape these critical regions. During training, the value function derived from the Min-BRT solution informs the initialization of the Critic networks, enhancing training efficiency. Real-world scenario-based experimental results with actual vehicles validate that the proposed policy, effectively executes beyond-the-limit maneuvers, mitigating collision risks under emergency condition. Furthermore, these extreme maneuvers are executed with minimal deviation from the original driving objectives, ensuring a smooth and stable transition upon completion of extreme maneuvers.</p></div>","PeriodicalId":50941,"journal":{"name":"Advanced Engineering Informatics","volume":"62 ","pages":"Article 102801"},"PeriodicalIF":9.9000,"publicationDate":"2024-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Autonomous vehicle extreme control for emergency collision avoidance via Reachability-Guided reinforcement learning\",\"authors\":\"Shiyue Zhao , Junzhi Zhang , Chengkun He , Yuan Ji , Heye Huang , Xiaohui Hou\",\"doi\":\"10.1016/j.aei.2024.102801\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>The emergency collision avoidance capabilities of autonomous vehicles (AVs) are crucial for enhancing their active safety performance, particularly in extreme scenarios where standard methods fall short. This study introduces an Extreme Maneuver Controller (EMC) for AVs, utilizing reachability-guided reinforcement learning (RL) to address these challenging situations. By applying pseudospectral methods, we solve the minimum backward reachable tube (Min-BRT) to identify regions where conventional avoidance maneuvers are infeasible, establishing a theoretical basis for triggering extreme maneuvers. A novel controller, employing reachability-guided RL, enables vehicles to execute extreme maneuvers to escape these critical regions. During training, the value function derived from the Min-BRT solution informs the initialization of the Critic networks, enhancing training efficiency. Real-world scenario-based experimental results with actual vehicles validate that the proposed policy, effectively executes beyond-the-limit maneuvers, mitigating collision risks under emergency condition. Furthermore, these extreme maneuvers are executed with minimal deviation from the original driving objectives, ensuring a smooth and stable transition upon completion of extreme maneuvers.</p></div>\",\"PeriodicalId\":50941,\"journal\":{\"name\":\"Advanced Engineering Informatics\",\"volume\":\"62 \",\"pages\":\"Article 102801\"},\"PeriodicalIF\":9.9000,\"publicationDate\":\"2024-10-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Engineering Informatics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S147403462400449X\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/9/16 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Engineering Informatics","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S147403462400449X","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/16 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Autonomous vehicle extreme control for emergency collision avoidance via Reachability-Guided reinforcement learning
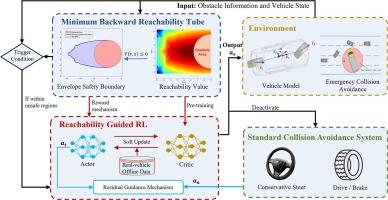
The emergency collision avoidance capabilities of autonomous vehicles (AVs) are crucial for enhancing their active safety performance, particularly in extreme scenarios where standard methods fall short. This study introduces an Extreme Maneuver Controller (EMC) for AVs, utilizing reachability-guided reinforcement learning (RL) to address these challenging situations. By applying pseudospectral methods, we solve the minimum backward reachable tube (Min-BRT) to identify regions where conventional avoidance maneuvers are infeasible, establishing a theoretical basis for triggering extreme maneuvers. A novel controller, employing reachability-guided RL, enables vehicles to execute extreme maneuvers to escape these critical regions. During training, the value function derived from the Min-BRT solution informs the initialization of the Critic networks, enhancing training efficiency. Real-world scenario-based experimental results with actual vehicles validate that the proposed policy, effectively executes beyond-the-limit maneuvers, mitigating collision risks under emergency condition. Furthermore, these extreme maneuvers are executed with minimal deviation from the original driving objectives, ensuring a smooth and stable transition upon completion of extreme maneuvers.
期刊介绍:
Advanced Engineering Informatics is an international Journal that solicits research papers with an emphasis on 'knowledge' and 'engineering applications'. The Journal seeks original papers that report progress in applying methods of engineering informatics. These papers should have engineering relevance and help provide a scientific base for more reliable, spontaneous, and creative engineering decision-making. Additionally, papers should demonstrate the science of supporting knowledge-intensive engineering tasks and validate the generality, power, and scalability of new methods through rigorous evaluation, preferably both qualitatively and quantitatively. Abstracting and indexing for Advanced Engineering Informatics include Science Citation Index Expanded, Scopus and INSPEC.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
