{"title":"Picotaur:15 毫克六面体机器人,带静电驱动的 3D 打印腿","authors":"Sukjun Kim, Aaron M. Johnson, Sarah Bergbreiter","doi":"10.1002/aisy.202400196","DOIUrl":null,"url":null,"abstract":"<p>Dynamic and agile locomotion in legged robots enables them to overcome obstacles and navigate complex and unstructured terrain. However, the leg mechanisms and actuators needed for versatile locomotion are much more challenging to manufacture and integrate in sub-gram scale robots. Herein, Picotaur, a 15.4 mg hexapedal robot with legs that enable various locomotion tasks such as turning, climbing 3D-printed stairs, and pushing loads for the first time at these size scales, is presented. 3D printing with two-photon polymerization enables the manufacture of electrostatically driven 2 degrees of freedom legs on a robot body made from a flexible printed circuit board. Based on simple control inputs, Picotaur can achieve alternating tripod gaits, reaching speeds up to 57 mm (7.2 body lengths) per second, as well as pronking gaits to tackle a wider variety of terrain. This approach to manufacturing and controlling legged robots at smaller scales provides a path forward toward robots that can be used for practical applications ranging from inspection to exploration and rival the performance of insects at similar size scales.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 10","pages":""},"PeriodicalIF":6.1000,"publicationDate":"2024-06-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400196","citationCount":"0","resultStr":"{\"title\":\"Picotaur: A 15 mg Hexapedal Robot with Electrostatically Driven, 3D-Printed Legs\",\"authors\":\"Sukjun Kim, Aaron M. Johnson, Sarah Bergbreiter\",\"doi\":\"10.1002/aisy.202400196\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Dynamic and agile locomotion in legged robots enables them to overcome obstacles and navigate complex and unstructured terrain. However, the leg mechanisms and actuators needed for versatile locomotion are much more challenging to manufacture and integrate in sub-gram scale robots. Herein, Picotaur, a 15.4 mg hexapedal robot with legs that enable various locomotion tasks such as turning, climbing 3D-printed stairs, and pushing loads for the first time at these size scales, is presented. 3D printing with two-photon polymerization enables the manufacture of electrostatically driven 2 degrees of freedom legs on a robot body made from a flexible printed circuit board. Based on simple control inputs, Picotaur can achieve alternating tripod gaits, reaching speeds up to 57 mm (7.2 body lengths) per second, as well as pronking gaits to tackle a wider variety of terrain. This approach to manufacturing and controlling legged robots at smaller scales provides a path forward toward robots that can be used for practical applications ranging from inspection to exploration and rival the performance of insects at similar size scales.</p>\",\"PeriodicalId\":93858,\"journal\":{\"name\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"volume\":\"6 10\",\"pages\":\"\"},\"PeriodicalIF\":6.1000,\"publicationDate\":\"2024-06-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400196\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202400196\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202400196","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Picotaur: A 15 mg Hexapedal Robot with Electrostatically Driven, 3D-Printed Legs
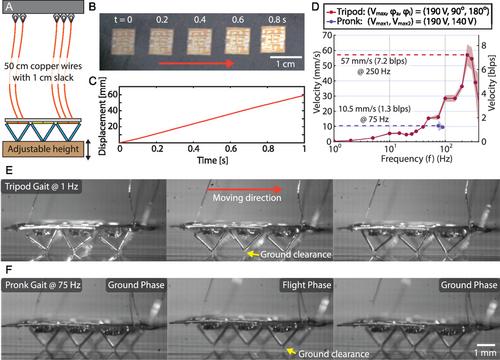
Dynamic and agile locomotion in legged robots enables them to overcome obstacles and navigate complex and unstructured terrain. However, the leg mechanisms and actuators needed for versatile locomotion are much more challenging to manufacture and integrate in sub-gram scale robots. Herein, Picotaur, a 15.4 mg hexapedal robot with legs that enable various locomotion tasks such as turning, climbing 3D-printed stairs, and pushing loads for the first time at these size scales, is presented. 3D printing with two-photon polymerization enables the manufacture of electrostatically driven 2 degrees of freedom legs on a robot body made from a flexible printed circuit board. Based on simple control inputs, Picotaur can achieve alternating tripod gaits, reaching speeds up to 57 mm (7.2 body lengths) per second, as well as pronking gaits to tackle a wider variety of terrain. This approach to manufacturing and controlling legged robots at smaller scales provides a path forward toward robots that can be used for practical applications ranging from inspection to exploration and rival the performance of insects at similar size scales.




 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
