{"title":"考虑冗余运动学的机器人焊接有效路径规划方法","authors":"Guangxi Li , Zhizhen Ren , Wei Yue , Haitao Liu","doi":"10.1016/j.precisioneng.2024.10.008","DOIUrl":null,"url":null,"abstract":"<div><div>Robot welding with redundant kinematics demands precise coordination of the welding path and redundant axis motion for stable operation. This paper introduces an effective G<sup>3</sup> continuous path planning approach for a 6-DOF friction stir welding robot, integrating redundant axis motion to enhance welding stability and quality. The method encompasses a two-pronged strategy: a five-axis path corner smoothing technique and a motion synchronization strategy. Initially, a robust toolpath preprocessing algorithm is presented to mitigate curvature extremities of the inserted smoothing curves within predefined error limits. Subsequently, leveraging G<sup>3</sup> continuity criteria, a B-spline-based smoothing method is advanced for refining tool position and orientation paths, with an analytical determination of spline control points facilitated by an explicit smoothing error expression. An effective motion synchronization technique is then proposed, which formulates the tool position, tool orientation, and redundant axis path as explicit functions of the position path arc length. The effectiveness of the proposed method is demonstrated through simulations and experiments on a robot welding platform, with the integration of a jerk-continuous feedrate profile for smooth motion execution. The findings indicate a significant improvement in robotic welding quality by integrating the proposed path planning method with existing workpiece posture optimization techniques.</div></div>","PeriodicalId":54589,"journal":{"name":"Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology","volume":"91 ","pages":"Pages 462-475"},"PeriodicalIF":4.5000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"An effective path planning approach for robot welding considering redundant kinematics\",\"authors\":\"Guangxi Li , Zhizhen Ren , Wei Yue , Haitao Liu\",\"doi\":\"10.1016/j.precisioneng.2024.10.008\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>Robot welding with redundant kinematics demands precise coordination of the welding path and redundant axis motion for stable operation. This paper introduces an effective G<sup>3</sup> continuous path planning approach for a 6-DOF friction stir welding robot, integrating redundant axis motion to enhance welding stability and quality. The method encompasses a two-pronged strategy: a five-axis path corner smoothing technique and a motion synchronization strategy. Initially, a robust toolpath preprocessing algorithm is presented to mitigate curvature extremities of the inserted smoothing curves within predefined error limits. Subsequently, leveraging G<sup>3</sup> continuity criteria, a B-spline-based smoothing method is advanced for refining tool position and orientation paths, with an analytical determination of spline control points facilitated by an explicit smoothing error expression. An effective motion synchronization technique is then proposed, which formulates the tool position, tool orientation, and redundant axis path as explicit functions of the position path arc length. The effectiveness of the proposed method is demonstrated through simulations and experiments on a robot welding platform, with the integration of a jerk-continuous feedrate profile for smooth motion execution. The findings indicate a significant improvement in robotic welding quality by integrating the proposed path planning method with existing workpiece posture optimization techniques.</div></div>\",\"PeriodicalId\":54589,\"journal\":{\"name\":\"Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology\",\"volume\":\"91 \",\"pages\":\"Pages 462-475\"},\"PeriodicalIF\":4.5000,\"publicationDate\":\"2024-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0141635924002356\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/10/16 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, MANUFACTURING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0141635924002356","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/16 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"ENGINEERING, MANUFACTURING","Score":null,"Total":0}
引用次数: 0
摘要
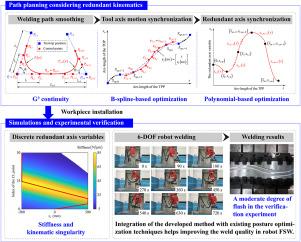
采用冗余运动学的机器人焊接需要精确协调焊接路径和冗余轴运动,以实现稳定运行。本文为 6-DOF 搅拌摩擦焊接机器人介绍了一种有效的 G3 连续路径规划方法,该方法整合了冗余轴运动以提高焊接稳定性和质量。该方法包括双管齐下的策略:五轴路径拐角平滑技术和运动同步策略。首先,提出了一种稳健的工具路径预处理算法,以在预定误差范围内减轻插入平滑曲线的曲率极值。随后,利用 G3 连续性标准,提出了一种基于 B 样条的平滑方法,用于细化刀具位置和方向路径,并通过明确的平滑误差表达式来分析确定样条控制点。然后提出了一种有效的运动同步技术,该技术将刀具位置、刀具方向和冗余轴路径表述为位置路径弧长的显式函数。通过在机器人焊接平台上进行仿真和实验,证明了所提方法的有效性。研究结果表明,通过将所提出的路径规划方法与现有的工件姿态优化技术相结合,机器人焊接质量得到了显著提高。
An effective path planning approach for robot welding considering redundant kinematics
Robot welding with redundant kinematics demands precise coordination of the welding path and redundant axis motion for stable operation. This paper introduces an effective G3 continuous path planning approach for a 6-DOF friction stir welding robot, integrating redundant axis motion to enhance welding stability and quality. The method encompasses a two-pronged strategy: a five-axis path corner smoothing technique and a motion synchronization strategy. Initially, a robust toolpath preprocessing algorithm is presented to mitigate curvature extremities of the inserted smoothing curves within predefined error limits. Subsequently, leveraging G3 continuity criteria, a B-spline-based smoothing method is advanced for refining tool position and orientation paths, with an analytical determination of spline control points facilitated by an explicit smoothing error expression. An effective motion synchronization technique is then proposed, which formulates the tool position, tool orientation, and redundant axis path as explicit functions of the position path arc length. The effectiveness of the proposed method is demonstrated through simulations and experiments on a robot welding platform, with the integration of a jerk-continuous feedrate profile for smooth motion execution. The findings indicate a significant improvement in robotic welding quality by integrating the proposed path planning method with existing workpiece posture optimization techniques.
期刊介绍:
Precision Engineering - Journal of the International Societies for Precision Engineering and Nanotechnology is devoted to the multidisciplinary study and practice of high accuracy engineering, metrology, and manufacturing. The journal takes an integrated approach to all subjects related to research, design, manufacture, performance validation, and application of high precision machines, instruments, and components, including fundamental and applied research and development in manufacturing processes, fabrication technology, and advanced measurement science. The scope includes precision-engineered systems and supporting metrology over the full range of length scales, from atom-based nanotechnology and advanced lithographic technology to large-scale systems, including optical and radio telescopes and macrometrology.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
