{"title":"基于深度强化学习和 PID 算法的自动驾驶汽车纵向分层控制","authors":"Jialu Ma, Pingping Zhang, Yixian Li, Yuhang Gao, Jiandong Zhao","doi":"10.1155/2024/2179275","DOIUrl":null,"url":null,"abstract":"<div>\n <p>Longitudinal control of autonomous vehicles (AVs) has long been a prominent subject and challenge. A hierarchical longitudinal control system that integrates deep deterministic policy gradient (DDPG) and proportional–integral–derivative (PID) control algorithms was proposed in this paper to ensure safe and efficient vehicle operation. First, a hierarchical control structure was employed to devise the longitudinal control algorithm, utilizing a Carsim-based model of the vehicle’s longitudinal dynamics. Subsequently, an upper controller algorithm was developed, combining DDPG and PID, wherein perceptual information such as leading vehicle speed and distance served as input state for the DDPG algorithm to determine PID parameters and output the desired acceleration of the vehicle. Following this, a lower controller was designed employing a PID-based driving and braking switching strategy. The disparity between the desired and actual accelerations was fed into the PID, which calculated the control acceleration to enact the driving and braking switching strategy. Finally, the effectiveness of the designed control algorithm was validated through simulation scenarios using Carsim and Simulink. Results demonstrate that the longitudinal control method proposed herein adeptly manages vehicle speed and following distance, thus satisfying the safety requirements of AVs.</p>\n </div>","PeriodicalId":50259,"journal":{"name":"Journal of Advanced Transportation","volume":"2024 1","pages":""},"PeriodicalIF":2.2000,"publicationDate":"2024-11-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/2179275","citationCount":"0","resultStr":"{\"title\":\"Longitudinal Hierarchical Control of Autonomous Vehicle Based on Deep Reinforcement Learning and PID Algorithm\",\"authors\":\"Jialu Ma, Pingping Zhang, Yixian Li, Yuhang Gao, Jiandong Zhao\",\"doi\":\"10.1155/2024/2179275\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n <p>Longitudinal control of autonomous vehicles (AVs) has long been a prominent subject and challenge. A hierarchical longitudinal control system that integrates deep deterministic policy gradient (DDPG) and proportional–integral–derivative (PID) control algorithms was proposed in this paper to ensure safe and efficient vehicle operation. First, a hierarchical control structure was employed to devise the longitudinal control algorithm, utilizing a Carsim-based model of the vehicle’s longitudinal dynamics. Subsequently, an upper controller algorithm was developed, combining DDPG and PID, wherein perceptual information such as leading vehicle speed and distance served as input state for the DDPG algorithm to determine PID parameters and output the desired acceleration of the vehicle. Following this, a lower controller was designed employing a PID-based driving and braking switching strategy. The disparity between the desired and actual accelerations was fed into the PID, which calculated the control acceleration to enact the driving and braking switching strategy. Finally, the effectiveness of the designed control algorithm was validated through simulation scenarios using Carsim and Simulink. Results demonstrate that the longitudinal control method proposed herein adeptly manages vehicle speed and following distance, thus satisfying the safety requirements of AVs.</p>\\n </div>\",\"PeriodicalId\":50259,\"journal\":{\"name\":\"Journal of Advanced Transportation\",\"volume\":\"2024 1\",\"pages\":\"\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2024-11-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/2179275\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Advanced Transportation\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1155/2024/2179275\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, CIVIL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Advanced Transportation","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1155/2024/2179275","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, CIVIL","Score":null,"Total":0}
Longitudinal Hierarchical Control of Autonomous Vehicle Based on Deep Reinforcement Learning and PID Algorithm
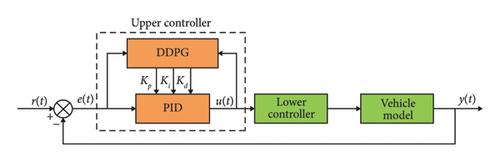
Longitudinal control of autonomous vehicles (AVs) has long been a prominent subject and challenge. A hierarchical longitudinal control system that integrates deep deterministic policy gradient (DDPG) and proportional–integral–derivative (PID) control algorithms was proposed in this paper to ensure safe and efficient vehicle operation. First, a hierarchical control structure was employed to devise the longitudinal control algorithm, utilizing a Carsim-based model of the vehicle’s longitudinal dynamics. Subsequently, an upper controller algorithm was developed, combining DDPG and PID, wherein perceptual information such as leading vehicle speed and distance served as input state for the DDPG algorithm to determine PID parameters and output the desired acceleration of the vehicle. Following this, a lower controller was designed employing a PID-based driving and braking switching strategy. The disparity between the desired and actual accelerations was fed into the PID, which calculated the control acceleration to enact the driving and braking switching strategy. Finally, the effectiveness of the designed control algorithm was validated through simulation scenarios using Carsim and Simulink. Results demonstrate that the longitudinal control method proposed herein adeptly manages vehicle speed and following distance, thus satisfying the safety requirements of AVs.
期刊介绍:
The Journal of Advanced Transportation (JAT) is a fully peer reviewed international journal in transportation research areas related to public transit, road traffic, transport networks and air transport.
It publishes theoretical and innovative papers on analysis, design, operations, optimization and planning of multi-modal transport networks, transit & traffic systems, transport technology and traffic safety. Urban rail and bus systems, Pedestrian studies, traffic flow theory and control, Intelligent Transport Systems (ITS) and automated and/or connected vehicles are some topics of interest.
Highway engineering, railway engineering and logistics do not fall within the aims and scope of JAT.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
