{"title":"用于液滴操控的软磁活性超疏水弹性体的三维打印技术","authors":"Xinying Li, Tianqi Pang, Ziyue Huang, Jianping Wang, Fang Huang, Liang Zhang","doi":"10.1016/j.matlet.2024.137658","DOIUrl":null,"url":null,"abstract":"<div><div>Soft responsive surfaces have generated significant interest due to their dynamic control over wetting behaviors through geometrical reorganization in response to external stimuli. Here, magnetoactive elastomeric surfaces are 3D printed using the direct ink writing technology. By designing a “high-wall” structure, superhydrophobic ability is achieved, with water contact angle of 152° and a sliding angle of 9°. The mechanical softness of the elastomer allows for reversible geometrical changes under magnetic field. This deformation can be precisely controlled by adjusting the strength and position of the magnet, causing the water droplet to move towards the desired location with a speed of 3.33 mm/s. This study introduces a new strategy for achieving lossless transportation of μL-scale nonmagnetic droplets, which holds potential for applications in microfluidics and soft robotics.</div></div>","PeriodicalId":384,"journal":{"name":"Materials Letters","volume":"379 ","pages":"Article 137658"},"PeriodicalIF":2.6000,"publicationDate":"2025-01-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"3D printing of soft magnetoactive superhydrophobic elastomers for droplet manipulation\",\"authors\":\"Xinying Li, Tianqi Pang, Ziyue Huang, Jianping Wang, Fang Huang, Liang Zhang\",\"doi\":\"10.1016/j.matlet.2024.137658\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>Soft responsive surfaces have generated significant interest due to their dynamic control over wetting behaviors through geometrical reorganization in response to external stimuli. Here, magnetoactive elastomeric surfaces are 3D printed using the direct ink writing technology. By designing a “high-wall” structure, superhydrophobic ability is achieved, with water contact angle of 152° and a sliding angle of 9°. The mechanical softness of the elastomer allows for reversible geometrical changes under magnetic field. This deformation can be precisely controlled by adjusting the strength and position of the magnet, causing the water droplet to move towards the desired location with a speed of 3.33 mm/s. This study introduces a new strategy for achieving lossless transportation of μL-scale nonmagnetic droplets, which holds potential for applications in microfluidics and soft robotics.</div></div>\",\"PeriodicalId\":384,\"journal\":{\"name\":\"Materials Letters\",\"volume\":\"379 \",\"pages\":\"Article 137658\"},\"PeriodicalIF\":2.6000,\"publicationDate\":\"2025-01-15\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Materials Letters\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0167577X24017981\",\"RegionNum\":4,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/11/4 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q3\",\"JCRName\":\"MATERIALS SCIENCE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Materials Letters","FirstCategoryId":"88","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0167577X24017981","RegionNum":4,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/4 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
3D printing of soft magnetoactive superhydrophobic elastomers for droplet manipulation
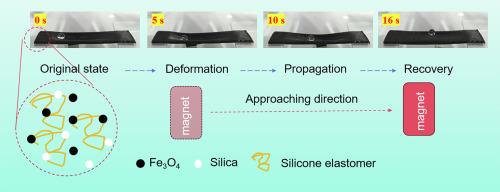
Soft responsive surfaces have generated significant interest due to their dynamic control over wetting behaviors through geometrical reorganization in response to external stimuli. Here, magnetoactive elastomeric surfaces are 3D printed using the direct ink writing technology. By designing a “high-wall” structure, superhydrophobic ability is achieved, with water contact angle of 152° and a sliding angle of 9°. The mechanical softness of the elastomer allows for reversible geometrical changes under magnetic field. This deformation can be precisely controlled by adjusting the strength and position of the magnet, causing the water droplet to move towards the desired location with a speed of 3.33 mm/s. This study introduces a new strategy for achieving lossless transportation of μL-scale nonmagnetic droplets, which holds potential for applications in microfluidics and soft robotics.
期刊介绍:
Materials Letters has an open access mirror journal Materials Letters: X, sharing the same aims and scope, editorial team, submission system and rigorous peer review.
Materials Letters is dedicated to publishing novel, cutting edge reports of broad interest to the materials community. The journal provides a forum for materials scientists and engineers, physicists, and chemists to rapidly communicate on the most important topics in the field of materials.
Contributions include, but are not limited to, a variety of topics such as:
• Materials - Metals and alloys, amorphous solids, ceramics, composites, polymers, semiconductors
• Applications - Structural, opto-electronic, magnetic, medical, MEMS, sensors, smart
• Characterization - Analytical, microscopy, scanning probes, nanoscopic, optical, electrical, magnetic, acoustic, spectroscopic, diffraction
• Novel Materials - Micro and nanostructures (nanowires, nanotubes, nanoparticles), nanocomposites, thin films, superlattices, quantum dots.
• Processing - Crystal growth, thin film processing, sol-gel processing, mechanical processing, assembly, nanocrystalline processing.
• Properties - Mechanical, magnetic, optical, electrical, ferroelectric, thermal, interfacial, transport, thermodynamic
• Synthesis - Quenching, solid state, solidification, solution synthesis, vapor deposition, high pressure, explosive




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
