Xinlong Li , Mingtao Ding , Zhenhong Li , Peng Cui
{"title":"多波段无人机摄影测量共准法的共同特征轨迹匹配方法","authors":"Xinlong Li , Mingtao Ding , Zhenhong Li , Peng Cui","doi":"10.1016/j.isprsjprs.2024.10.025","DOIUrl":null,"url":null,"abstract":"<div><div>Automatic co-registration of multi-epoch Unmanned Aerial Vehicle (UAV) image sets remains challenging due to the radiometric differences in complex dynamic scenes. Specifically, illumination changes and vegetation variations usually lead to insufficient and spatially unevenly distributed common tie points (CTPs), resulting in under-fitting of co-registration near the areas without CTPs. In this paper, we propose a novel Common-Feature-Track-Matching (CFTM) approach for UAV image sets co-registration, to alleviate the shortage of CTPs in complex dynamic scenes. Instead of matching features between multi-epoch images, we first search correspondences between multi-epoch feature tracks (i.e., groups of features corresponding to the same 3D points), which avoids the removal of matches due to unreliable estimation of the relative pose between inter-epoch image pairs. Then, the CTPs are triangulated from the successfully matched track pairs. Since an even distribution of CTPs is crucial for robust co-registration, a block-based strategy is designed, as well as enabling parallel computation. Finally, an iterative optimization algorithm is developed to gradually select the best CTPs to refine the poses of multi-epoch images. We assess the performance of our method on two challenging datasets. The results show that CFTM can automatically acquire adequate and evenly distributed CTPs in complex dynamic scenes, achieving a high co-registration accuracy approximately four times higher than the state-of-the-art in challenging scenario. Our code is available at <span><span>https://github.com/lixinlong1998/CoSfM</span><svg><path></path></svg></span>.</div></div>","PeriodicalId":50269,"journal":{"name":"ISPRS Journal of Photogrammetry and Remote Sensing","volume":"218 ","pages":"Pages 392-407"},"PeriodicalIF":12.2000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Common-feature-track-matching approach for multi-epoch UAV photogrammetry co-registration\",\"authors\":\"Xinlong Li , Mingtao Ding , Zhenhong Li , Peng Cui\",\"doi\":\"10.1016/j.isprsjprs.2024.10.025\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>Automatic co-registration of multi-epoch Unmanned Aerial Vehicle (UAV) image sets remains challenging due to the radiometric differences in complex dynamic scenes. Specifically, illumination changes and vegetation variations usually lead to insufficient and spatially unevenly distributed common tie points (CTPs), resulting in under-fitting of co-registration near the areas without CTPs. In this paper, we propose a novel Common-Feature-Track-Matching (CFTM) approach for UAV image sets co-registration, to alleviate the shortage of CTPs in complex dynamic scenes. Instead of matching features between multi-epoch images, we first search correspondences between multi-epoch feature tracks (i.e., groups of features corresponding to the same 3D points), which avoids the removal of matches due to unreliable estimation of the relative pose between inter-epoch image pairs. Then, the CTPs are triangulated from the successfully matched track pairs. Since an even distribution of CTPs is crucial for robust co-registration, a block-based strategy is designed, as well as enabling parallel computation. Finally, an iterative optimization algorithm is developed to gradually select the best CTPs to refine the poses of multi-epoch images. We assess the performance of our method on two challenging datasets. The results show that CFTM can automatically acquire adequate and evenly distributed CTPs in complex dynamic scenes, achieving a high co-registration accuracy approximately four times higher than the state-of-the-art in challenging scenario. Our code is available at <span><span>https://github.com/lixinlong1998/CoSfM</span><svg><path></path></svg></span>.</div></div>\",\"PeriodicalId\":50269,\"journal\":{\"name\":\"ISPRS Journal of Photogrammetry and Remote Sensing\",\"volume\":\"218 \",\"pages\":\"Pages 392-407\"},\"PeriodicalIF\":12.2000,\"publicationDate\":\"2024-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ISPRS Journal of Photogrammetry and Remote Sensing\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0924271624004027\",\"RegionNum\":1,\"RegionCategory\":\"地球科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/11/14 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"GEOGRAPHY, PHYSICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ISPRS Journal of Photogrammetry and Remote Sensing","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0924271624004027","RegionNum":1,"RegionCategory":"地球科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/14 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"GEOGRAPHY, PHYSICAL","Score":null,"Total":0}
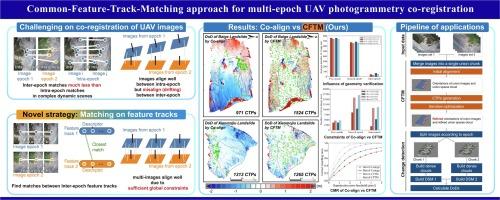
Common-feature-track-matching approach for multi-epoch UAV photogrammetry co-registration
Automatic co-registration of multi-epoch Unmanned Aerial Vehicle (UAV) image sets remains challenging due to the radiometric differences in complex dynamic scenes. Specifically, illumination changes and vegetation variations usually lead to insufficient and spatially unevenly distributed common tie points (CTPs), resulting in under-fitting of co-registration near the areas without CTPs. In this paper, we propose a novel Common-Feature-Track-Matching (CFTM) approach for UAV image sets co-registration, to alleviate the shortage of CTPs in complex dynamic scenes. Instead of matching features between multi-epoch images, we first search correspondences between multi-epoch feature tracks (i.e., groups of features corresponding to the same 3D points), which avoids the removal of matches due to unreliable estimation of the relative pose between inter-epoch image pairs. Then, the CTPs are triangulated from the successfully matched track pairs. Since an even distribution of CTPs is crucial for robust co-registration, a block-based strategy is designed, as well as enabling parallel computation. Finally, an iterative optimization algorithm is developed to gradually select the best CTPs to refine the poses of multi-epoch images. We assess the performance of our method on two challenging datasets. The results show that CFTM can automatically acquire adequate and evenly distributed CTPs in complex dynamic scenes, achieving a high co-registration accuracy approximately four times higher than the state-of-the-art in challenging scenario. Our code is available at https://github.com/lixinlong1998/CoSfM.
期刊介绍:
The ISPRS Journal of Photogrammetry and Remote Sensing (P&RS) serves as the official journal of the International Society for Photogrammetry and Remote Sensing (ISPRS). It acts as a platform for scientists and professionals worldwide who are involved in various disciplines that utilize photogrammetry, remote sensing, spatial information systems, computer vision, and related fields. The journal aims to facilitate communication and dissemination of advancements in these disciplines, while also acting as a comprehensive source of reference and archive.
P&RS endeavors to publish high-quality, peer-reviewed research papers that are preferably original and have not been published before. These papers can cover scientific/research, technological development, or application/practical aspects. Additionally, the journal welcomes papers that are based on presentations from ISPRS meetings, as long as they are considered significant contributions to the aforementioned fields.
In particular, P&RS encourages the submission of papers that are of broad scientific interest, showcase innovative applications (especially in emerging fields), have an interdisciplinary focus, discuss topics that have received limited attention in P&RS or related journals, or explore new directions in scientific or professional realms. It is preferred that theoretical papers include practical applications, while papers focusing on systems and applications should include a theoretical background.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
