Xiangpeng Cai , Bowen Lv , Hanchen Yao , Ting Yang , Houde Dai
{"title":"V-FCW:利用 V2X 网络针对弯道冲突的基于向量的前向碰撞预警算法。","authors":"Xiangpeng Cai , Bowen Lv , Hanchen Yao , Ting Yang , Houde Dai","doi":"10.1016/j.aap.2024.107836","DOIUrl":null,"url":null,"abstract":"<div><div>The implementation of advanced driver assistance systems (ADAS) has significantly impacted the prevention of traffic accidents, particularly through the forward collision warning (FCW) algorithm. Nevertheless, traffic conflicts on traffic routes remain a significant issue, since most FCW algorithms cannot accurately determine the distance between the host vehicle (HV) and remote vehicle (RV) on curved roads. Hence, this study proposes a vector-based FCW (V-FCW) algorithm to address the issue of false warnings on unconventional road sections. The V-FCW algorithm employs vector relationships to estimate the poses of HV and RV at the current and next moments, thereby effectively calculating the relative angles. Firstly, the HV and RV transmit their position vector, velocity vector, and heading angle in real time via the vehicle-to-vehicle (V2V) communication technique. Subsequently, the localization of lanes is conducted through the vehicle-to-infrastructure (V2I) communication technique, with the assistance of roadside unit (RSU)-based local maps. Finally, a V-FCW algorithm was implemented on the Simcenter Prescan simulation platform and a cellular vehicle-to-everything (C-V2X, i.e., the combination of V2V and V2I) communication platform. The simulation results demonstrate that the proposed V-FCW algorithm can accurately identify and warn dangerous vehicles on both straight and curved roads. Moreover, the experimental results obtained from the hardware-in-the-loop approach illustrate the efficacy of the proposed V-FCW algorithm in accurately forecasting four warning levels on both straight and curved roads. Consequently, this study yields a significant contribution to the field of vehicle-road cooperation in C-V2X-enable intelligent driving.</div></div>","PeriodicalId":6926,"journal":{"name":"Accident; analysis and prevention","volume":"210 ","pages":"Article 107836"},"PeriodicalIF":7.4000,"publicationDate":"2025-02-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"V-FCW: Vector-based forward collision warning algorithm for curved road conflicts using V2X networks\",\"authors\":\"Xiangpeng Cai , Bowen Lv , Hanchen Yao , Ting Yang , Houde Dai\",\"doi\":\"10.1016/j.aap.2024.107836\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>The implementation of advanced driver assistance systems (ADAS) has significantly impacted the prevention of traffic accidents, particularly through the forward collision warning (FCW) algorithm. Nevertheless, traffic conflicts on traffic routes remain a significant issue, since most FCW algorithms cannot accurately determine the distance between the host vehicle (HV) and remote vehicle (RV) on curved roads. Hence, this study proposes a vector-based FCW (V-FCW) algorithm to address the issue of false warnings on unconventional road sections. The V-FCW algorithm employs vector relationships to estimate the poses of HV and RV at the current and next moments, thereby effectively calculating the relative angles. Firstly, the HV and RV transmit their position vector, velocity vector, and heading angle in real time via the vehicle-to-vehicle (V2V) communication technique. Subsequently, the localization of lanes is conducted through the vehicle-to-infrastructure (V2I) communication technique, with the assistance of roadside unit (RSU)-based local maps. Finally, a V-FCW algorithm was implemented on the Simcenter Prescan simulation platform and a cellular vehicle-to-everything (C-V2X, i.e., the combination of V2V and V2I) communication platform. The simulation results demonstrate that the proposed V-FCW algorithm can accurately identify and warn dangerous vehicles on both straight and curved roads. Moreover, the experimental results obtained from the hardware-in-the-loop approach illustrate the efficacy of the proposed V-FCW algorithm in accurately forecasting four warning levels on both straight and curved roads. Consequently, this study yields a significant contribution to the field of vehicle-road cooperation in C-V2X-enable intelligent driving.</div></div>\",\"PeriodicalId\":6926,\"journal\":{\"name\":\"Accident; analysis and prevention\",\"volume\":\"210 \",\"pages\":\"Article 107836\"},\"PeriodicalIF\":7.4000,\"publicationDate\":\"2025-02-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Accident; analysis and prevention\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0001457524003816\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/11/20 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ERGONOMICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Accident; analysis and prevention","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0001457524003816","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/20 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ERGONOMICS","Score":null,"Total":0}
V-FCW: Vector-based forward collision warning algorithm for curved road conflicts using V2X networks
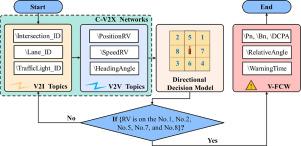
The implementation of advanced driver assistance systems (ADAS) has significantly impacted the prevention of traffic accidents, particularly through the forward collision warning (FCW) algorithm. Nevertheless, traffic conflicts on traffic routes remain a significant issue, since most FCW algorithms cannot accurately determine the distance between the host vehicle (HV) and remote vehicle (RV) on curved roads. Hence, this study proposes a vector-based FCW (V-FCW) algorithm to address the issue of false warnings on unconventional road sections. The V-FCW algorithm employs vector relationships to estimate the poses of HV and RV at the current and next moments, thereby effectively calculating the relative angles. Firstly, the HV and RV transmit their position vector, velocity vector, and heading angle in real time via the vehicle-to-vehicle (V2V) communication technique. Subsequently, the localization of lanes is conducted through the vehicle-to-infrastructure (V2I) communication technique, with the assistance of roadside unit (RSU)-based local maps. Finally, a V-FCW algorithm was implemented on the Simcenter Prescan simulation platform and a cellular vehicle-to-everything (C-V2X, i.e., the combination of V2V and V2I) communication platform. The simulation results demonstrate that the proposed V-FCW algorithm can accurately identify and warn dangerous vehicles on both straight and curved roads. Moreover, the experimental results obtained from the hardware-in-the-loop approach illustrate the efficacy of the proposed V-FCW algorithm in accurately forecasting four warning levels on both straight and curved roads. Consequently, this study yields a significant contribution to the field of vehicle-road cooperation in C-V2X-enable intelligent driving.
期刊介绍:
Accident Analysis & Prevention provides wide coverage of the general areas relating to accidental injury and damage, including the pre-injury and immediate post-injury phases. Published papers deal with medical, legal, economic, educational, behavioral, theoretical or empirical aspects of transportation accidents, as well as with accidents at other sites. Selected topics within the scope of the Journal may include: studies of human, environmental and vehicular factors influencing the occurrence, type and severity of accidents and injury; the design, implementation and evaluation of countermeasures; biomechanics of impact and human tolerance limits to injury; modelling and statistical analysis of accident data; policy, planning and decision-making in safety.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
