Yuchun Wang , Jianwei Gong , Boyang Wang , Peng Jia , Tansyou Kyo
{"title":"智能车辆越野测试场景设计与库生成","authors":"Yuchun Wang , Jianwei Gong , Boyang Wang , Peng Jia , Tansyou Kyo","doi":"10.1016/j.geits.2022.100013","DOIUrl":null,"url":null,"abstract":"<div><p>To realize the widespread application and continuous functional development of intelligent vehicles, test and evaluation of vehicle's functionality and Safety Performance in complex off-road scenarios are fundamental. Since traditional distance-based road tests cannot meet the evolving test requirements, a method to design the function-based off-road testing scenario library for intelligent vehicles(IV) is proposed in this paper. The testing scenario library is defined as a critical set of scenarios that can be used for IV tests. First, for the complex and diverse off-road scenarios, a hierarchical, structural model of the test scenario is built. Then, the critical test scenarios are selected adaptively according to the vehicle model to be tested. Next, those parameters representing the challenging test scenarios are selected. The selected parameters need to fit the natural distribution probability of scenarios. The critical test-scenario library is built combing these parameters with the structural model. Finally, the test scenarios that are most approximate to the natural driving scenario are determined with importance sampling theory. The test-scenario library built with this method can provide more critical test scenarios, and is widely applicable despite different vehicle models. Verified by simulation in the off-road interaction scenarios, test would be accelerated significantly with this method, about 800 times faster than testing in the natural road environment.</p></div>","PeriodicalId":100596,"journal":{"name":"Green Energy and Intelligent Transportation","volume":"1 3","pages":"Article 100013"},"PeriodicalIF":16.4000,"publicationDate":"2022-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2773153722000135/pdfft?md5=98166711722d4982973d90138164648c&pid=1-s2.0-S2773153722000135-main.pdf","citationCount":"1","resultStr":"{\"title\":\"Off-road testing scenario design and library generation for intelligent vehicles\",\"authors\":\"Yuchun Wang , Jianwei Gong , Boyang Wang , Peng Jia , Tansyou Kyo\",\"doi\":\"10.1016/j.geits.2022.100013\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>To realize the widespread application and continuous functional development of intelligent vehicles, test and evaluation of vehicle's functionality and Safety Performance in complex off-road scenarios are fundamental. Since traditional distance-based road tests cannot meet the evolving test requirements, a method to design the function-based off-road testing scenario library for intelligent vehicles(IV) is proposed in this paper. The testing scenario library is defined as a critical set of scenarios that can be used for IV tests. First, for the complex and diverse off-road scenarios, a hierarchical, structural model of the test scenario is built. Then, the critical test scenarios are selected adaptively according to the vehicle model to be tested. Next, those parameters representing the challenging test scenarios are selected. The selected parameters need to fit the natural distribution probability of scenarios. The critical test-scenario library is built combing these parameters with the structural model. Finally, the test scenarios that are most approximate to the natural driving scenario are determined with importance sampling theory. The test-scenario library built with this method can provide more critical test scenarios, and is widely applicable despite different vehicle models. Verified by simulation in the off-road interaction scenarios, test would be accelerated significantly with this method, about 800 times faster than testing in the natural road environment.</p></div>\",\"PeriodicalId\":100596,\"journal\":{\"name\":\"Green Energy and Intelligent Transportation\",\"volume\":\"1 3\",\"pages\":\"Article 100013\"},\"PeriodicalIF\":16.4000,\"publicationDate\":\"2022-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2773153722000135/pdfft?md5=98166711722d4982973d90138164648c&pid=1-s2.0-S2773153722000135-main.pdf\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Green Energy and Intelligent Transportation\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2773153722000135\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2022/7/21 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Green Energy and Intelligent Transportation","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2773153722000135","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/7/21 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Off-road testing scenario design and library generation for intelligent vehicles
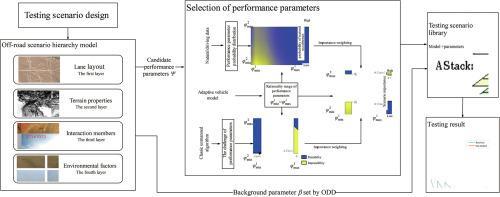
To realize the widespread application and continuous functional development of intelligent vehicles, test and evaluation of vehicle's functionality and Safety Performance in complex off-road scenarios are fundamental. Since traditional distance-based road tests cannot meet the evolving test requirements, a method to design the function-based off-road testing scenario library for intelligent vehicles(IV) is proposed in this paper. The testing scenario library is defined as a critical set of scenarios that can be used for IV tests. First, for the complex and diverse off-road scenarios, a hierarchical, structural model of the test scenario is built. Then, the critical test scenarios are selected adaptively according to the vehicle model to be tested. Next, those parameters representing the challenging test scenarios are selected. The selected parameters need to fit the natural distribution probability of scenarios. The critical test-scenario library is built combing these parameters with the structural model. Finally, the test scenarios that are most approximate to the natural driving scenario are determined with importance sampling theory. The test-scenario library built with this method can provide more critical test scenarios, and is widely applicable despite different vehicle models. Verified by simulation in the off-road interaction scenarios, test would be accelerated significantly with this method, about 800 times faster than testing in the natural road environment.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
