Ruidong Yan, Penghui Li, Hongbo Gao, Jin Huang, Chengbo Wang
{"title":"使用强化学习调整的扩展干扰观测器的智能网联汽车跟车策略","authors":"Ruidong Yan, Penghui Li, Hongbo Gao, Jin Huang, Chengbo Wang","doi":"10.1049/cit2.12252","DOIUrl":null,"url":null,"abstract":"<p>Disturbance observer-based control method has achieved good results in the car-following scenario of intelligent and connected vehicle (ICV). However, the gain of conventional extended disturbance observer (EDO)-based control method is usually set manually rather than adjusted adaptively according to real time traffic conditions, thus declining the car-following performance. To solve this problem, a car-following strategy of ICV using EDO adjusted by reinforcement learning is proposed. Different from the conventional method, the gain of proposed strategy can be adjusted by reinforcement learning to improve its estimation accuracy. Since the “equivalent disturbance” can be compensated by EDO to a great extent, the disturbance rejection ability of the car-following method will be improved significantly. Both Lyapunov approach and numerical simulations are carried out to verify the effectiveness of the proposed method.</p>","PeriodicalId":46211,"journal":{"name":"CAAI Transactions on Intelligence Technology","volume":"9 2","pages":"365-373"},"PeriodicalIF":7.3000,"publicationDate":"2023-07-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cit2.12252","citationCount":"0","resultStr":"{\"title\":\"Car-following strategy of intelligent connected vehicle using extended disturbance observer adjusted by reinforcement learning\",\"authors\":\"Ruidong Yan, Penghui Li, Hongbo Gao, Jin Huang, Chengbo Wang\",\"doi\":\"10.1049/cit2.12252\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Disturbance observer-based control method has achieved good results in the car-following scenario of intelligent and connected vehicle (ICV). However, the gain of conventional extended disturbance observer (EDO)-based control method is usually set manually rather than adjusted adaptively according to real time traffic conditions, thus declining the car-following performance. To solve this problem, a car-following strategy of ICV using EDO adjusted by reinforcement learning is proposed. Different from the conventional method, the gain of proposed strategy can be adjusted by reinforcement learning to improve its estimation accuracy. Since the “equivalent disturbance” can be compensated by EDO to a great extent, the disturbance rejection ability of the car-following method will be improved significantly. Both Lyapunov approach and numerical simulations are carried out to verify the effectiveness of the proposed method.</p>\",\"PeriodicalId\":46211,\"journal\":{\"name\":\"CAAI Transactions on Intelligence Technology\",\"volume\":\"9 2\",\"pages\":\"365-373\"},\"PeriodicalIF\":7.3000,\"publicationDate\":\"2023-07-03\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cit2.12252\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"CAAI Transactions on Intelligence Technology\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cit2.12252\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"CAAI Transactions on Intelligence Technology","FirstCategoryId":"94","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cit2.12252","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
摘要
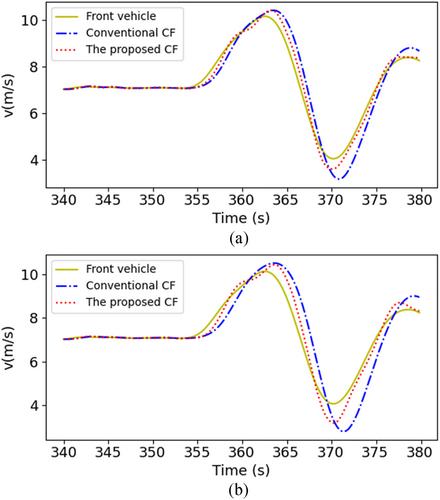
基于扰动观测器的控制方法在智能网联汽车(ICV)的汽车跟随场景中取得了良好的效果。然而,传统的基于扩展扰动观测器(EDO)的控制方法的增益通常是手动设置的,而不是根据实时交通状况进行自适应调节,从而降低了汽车跟随性能。为解决这一问题,本文提出了一种通过强化学习调整 EDO 的 ICV 汽车跟随策略。与传统方法不同的是,所提策略的增益可通过强化学习进行调整,以提高其估计精度。由于 EDO 可以在很大程度上补偿 "等效扰动",因此汽车跟随方法的扰动抑制能力将得到显著提高。为了验证所提方法的有效性,我们采用了李雅普诺夫方法并进行了数值模拟。
Car-following strategy of intelligent connected vehicle using extended disturbance observer adjusted by reinforcement learning
Disturbance observer-based control method has achieved good results in the car-following scenario of intelligent and connected vehicle (ICV). However, the gain of conventional extended disturbance observer (EDO)-based control method is usually set manually rather than adjusted adaptively according to real time traffic conditions, thus declining the car-following performance. To solve this problem, a car-following strategy of ICV using EDO adjusted by reinforcement learning is proposed. Different from the conventional method, the gain of proposed strategy can be adjusted by reinforcement learning to improve its estimation accuracy. Since the “equivalent disturbance” can be compensated by EDO to a great extent, the disturbance rejection ability of the car-following method will be improved significantly. Both Lyapunov approach and numerical simulations are carried out to verify the effectiveness of the proposed method.
期刊介绍:
CAAI Transactions on Intelligence Technology is a leading venue for original research on the theoretical and experimental aspects of artificial intelligence technology. We are a fully open access journal co-published by the Institution of Engineering and Technology (IET) and the Chinese Association for Artificial Intelligence (CAAI) providing research which is openly accessible to read and share worldwide.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
