Sandra Carrasco Limeros, Sylwia Majchrowska, Joakim Johnander, Christoffer Petersson, Miguel Ángel Sotelo, David Fernández Llorca
{"title":"实现值得信赖的多模式运动预测:输出的整体评估和可解释性","authors":"Sandra Carrasco Limeros, Sylwia Majchrowska, Joakim Johnander, Christoffer Petersson, Miguel Ángel Sotelo, David Fernández Llorca","doi":"10.1049/cit2.12244","DOIUrl":null,"url":null,"abstract":"<p>Predicting the motion of other road agents enables autonomous vehicles to perform safe and efficient path planning. This task is very complex, as the behaviour of road agents depends on many factors and the number of possible future trajectories can be considerable (multi-modal). Most prior approaches proposed to address multi-modal motion prediction are based on complex machine learning systems that have limited interpretability. Moreover, the metrics used in current benchmarks do not evaluate all aspects of the problem, such as the diversity and admissibility of the output. The authors aim to advance towards the design of trustworthy motion prediction systems, based on some of the requirements for the design of Trustworthy Artificial Intelligence. The focus is on evaluation criteria, robustness, and interpretability of outputs. First, the evaluation metrics are comprehensively analysed, the main gaps of current benchmarks are identified, and a new holistic evaluation framework is proposed. Then, a method for the assessment of spatial and temporal robustness is introduced by simulating noise in the perception system. To enhance the interpretability of the outputs and generate more balanced results in the proposed evaluation framework, an intent prediction layer that can be attached to multi-modal motion prediction models is proposed. The effectiveness of this approach is assessed through a survey that explores different elements in the visualisation of the multi-modal trajectories and intentions. The proposed approach and findings make a significant contribution to the development of trustworthy motion prediction systems for autonomous vehicles, advancing the field towards greater safety and reliability.</p>","PeriodicalId":46211,"journal":{"name":"CAAI Transactions on Intelligence Technology","volume":"9 3","pages":"557-572"},"PeriodicalIF":7.3000,"publicationDate":"2023-06-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cit2.12244","citationCount":"0","resultStr":"{\"title\":\"Towards trustworthy multi-modal motion prediction: Holistic evaluation and interpretability of outputs\",\"authors\":\"Sandra Carrasco Limeros, Sylwia Majchrowska, Joakim Johnander, Christoffer Petersson, Miguel Ángel Sotelo, David Fernández Llorca\",\"doi\":\"10.1049/cit2.12244\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Predicting the motion of other road agents enables autonomous vehicles to perform safe and efficient path planning. This task is very complex, as the behaviour of road agents depends on many factors and the number of possible future trajectories can be considerable (multi-modal). Most prior approaches proposed to address multi-modal motion prediction are based on complex machine learning systems that have limited interpretability. Moreover, the metrics used in current benchmarks do not evaluate all aspects of the problem, such as the diversity and admissibility of the output. The authors aim to advance towards the design of trustworthy motion prediction systems, based on some of the requirements for the design of Trustworthy Artificial Intelligence. The focus is on evaluation criteria, robustness, and interpretability of outputs. First, the evaluation metrics are comprehensively analysed, the main gaps of current benchmarks are identified, and a new holistic evaluation framework is proposed. Then, a method for the assessment of spatial and temporal robustness is introduced by simulating noise in the perception system. To enhance the interpretability of the outputs and generate more balanced results in the proposed evaluation framework, an intent prediction layer that can be attached to multi-modal motion prediction models is proposed. The effectiveness of this approach is assessed through a survey that explores different elements in the visualisation of the multi-modal trajectories and intentions. The proposed approach and findings make a significant contribution to the development of trustworthy motion prediction systems for autonomous vehicles, advancing the field towards greater safety and reliability.</p>\",\"PeriodicalId\":46211,\"journal\":{\"name\":\"CAAI Transactions on Intelligence Technology\",\"volume\":\"9 3\",\"pages\":\"557-572\"},\"PeriodicalIF\":7.3000,\"publicationDate\":\"2023-06-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cit2.12244\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"CAAI Transactions on Intelligence Technology\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cit2.12244\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"CAAI Transactions on Intelligence Technology","FirstCategoryId":"94","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cit2.12244","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Towards trustworthy multi-modal motion prediction: Holistic evaluation and interpretability of outputs
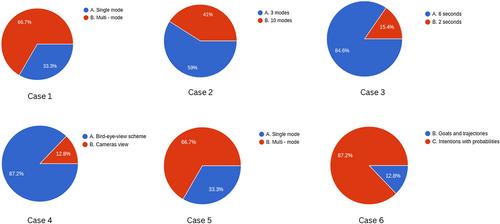
Predicting the motion of other road agents enables autonomous vehicles to perform safe and efficient path planning. This task is very complex, as the behaviour of road agents depends on many factors and the number of possible future trajectories can be considerable (multi-modal). Most prior approaches proposed to address multi-modal motion prediction are based on complex machine learning systems that have limited interpretability. Moreover, the metrics used in current benchmarks do not evaluate all aspects of the problem, such as the diversity and admissibility of the output. The authors aim to advance towards the design of trustworthy motion prediction systems, based on some of the requirements for the design of Trustworthy Artificial Intelligence. The focus is on evaluation criteria, robustness, and interpretability of outputs. First, the evaluation metrics are comprehensively analysed, the main gaps of current benchmarks are identified, and a new holistic evaluation framework is proposed. Then, a method for the assessment of spatial and temporal robustness is introduced by simulating noise in the perception system. To enhance the interpretability of the outputs and generate more balanced results in the proposed evaluation framework, an intent prediction layer that can be attached to multi-modal motion prediction models is proposed. The effectiveness of this approach is assessed through a survey that explores different elements in the visualisation of the multi-modal trajectories and intentions. The proposed approach and findings make a significant contribution to the development of trustworthy motion prediction systems for autonomous vehicles, advancing the field towards greater safety and reliability.
期刊介绍:
CAAI Transactions on Intelligence Technology is a leading venue for original research on the theoretical and experimental aspects of artificial intelligence technology. We are a fully open access journal co-published by the Institution of Engineering and Technology (IET) and the Chinese Association for Artificial Intelligence (CAAI) providing research which is openly accessible to read and share worldwide.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
