{"title":"基于边缘和直线检测的直接稀疏视觉里程测量点选择策略","authors":"Yinming Miao, Masahiro Yamaguchi","doi":"10.1016/j.gvc.2022.200051","DOIUrl":null,"url":null,"abstract":"<div><p>In most feature-based Visual Simultaneous Localization and Mapping systems, the pixels in a current image are compared with the correlative pixels in previous images, and the difference in the coordinates of pixels shows the movement of the camera. Different from the feature-based systems, direct methods operate on image intensity directly. Every pixel on the image or selected pixels with sufficient intensity gradient can be utilized. However, the noises in the images may affect the performance of those algorithms as the pixels are not adequately selected. In this work, we propose a new pixel selection method for a direct visual odometry system that focuses on the edge pixels. The edge pixels are usually more stable and repeatable than normal pixels. We apply the traditional edge detection method with adaptive parameters to get rough edge results. Then the edges are separated by gradient and shape. We use straightness, smoothness, length, and gradient magnitude to select the meaningful edges. We replace the pixel selection step of Direct Sparse Odometry and Direct Sparse Odometry with Loop Closure to present the evaluation on open datasets. The experimental results indicate that our method improves the performance of existing direct visual odometry systems in man-made scenes but is not suitable for pure natural scenes.</p></div>","PeriodicalId":100592,"journal":{"name":"Graphics and Visual Computing","volume":"6 ","pages":"Article 200051"},"PeriodicalIF":0.0000,"publicationDate":"2022-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2666629422000055/pdfft?md5=0d8257efc50aff81595f28fd075adf81&pid=1-s2.0-S2666629422000055-main.pdf","citationCount":"1","resultStr":"{\"title\":\"A point selection strategy with edge and line detection for Direct Sparse Visual Odometry\",\"authors\":\"Yinming Miao, Masahiro Yamaguchi\",\"doi\":\"10.1016/j.gvc.2022.200051\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In most feature-based Visual Simultaneous Localization and Mapping systems, the pixels in a current image are compared with the correlative pixels in previous images, and the difference in the coordinates of pixels shows the movement of the camera. Different from the feature-based systems, direct methods operate on image intensity directly. Every pixel on the image or selected pixels with sufficient intensity gradient can be utilized. However, the noises in the images may affect the performance of those algorithms as the pixels are not adequately selected. In this work, we propose a new pixel selection method for a direct visual odometry system that focuses on the edge pixels. The edge pixels are usually more stable and repeatable than normal pixels. We apply the traditional edge detection method with adaptive parameters to get rough edge results. Then the edges are separated by gradient and shape. We use straightness, smoothness, length, and gradient magnitude to select the meaningful edges. We replace the pixel selection step of Direct Sparse Odometry and Direct Sparse Odometry with Loop Closure to present the evaluation on open datasets. The experimental results indicate that our method improves the performance of existing direct visual odometry systems in man-made scenes but is not suitable for pure natural scenes.</p></div>\",\"PeriodicalId\":100592,\"journal\":{\"name\":\"Graphics and Visual Computing\",\"volume\":\"6 \",\"pages\":\"Article 200051\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2022-06-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2666629422000055/pdfft?md5=0d8257efc50aff81595f28fd075adf81&pid=1-s2.0-S2666629422000055-main.pdf\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Graphics and Visual Computing\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2666629422000055\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2022/5/27 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Graphics and Visual Computing","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2666629422000055","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/5/27 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
A point selection strategy with edge and line detection for Direct Sparse Visual Odometry
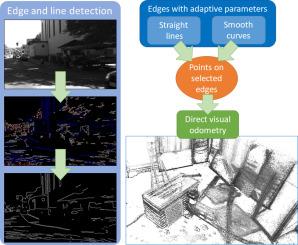
In most feature-based Visual Simultaneous Localization and Mapping systems, the pixels in a current image are compared with the correlative pixels in previous images, and the difference in the coordinates of pixels shows the movement of the camera. Different from the feature-based systems, direct methods operate on image intensity directly. Every pixel on the image or selected pixels with sufficient intensity gradient can be utilized. However, the noises in the images may affect the performance of those algorithms as the pixels are not adequately selected. In this work, we propose a new pixel selection method for a direct visual odometry system that focuses on the edge pixels. The edge pixels are usually more stable and repeatable than normal pixels. We apply the traditional edge detection method with adaptive parameters to get rough edge results. Then the edges are separated by gradient and shape. We use straightness, smoothness, length, and gradient magnitude to select the meaningful edges. We replace the pixel selection step of Direct Sparse Odometry and Direct Sparse Odometry with Loop Closure to present the evaluation on open datasets. The experimental results indicate that our method improves the performance of existing direct visual odometry systems in man-made scenes but is not suitable for pure natural scenes.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
