S E Hanson, W J Ray, A Santhanakrishnan, S N Patek
{"title":"螳螂虾的运动:混元游泳的协调与变异","authors":"S E Hanson, W J Ray, A Santhanakrishnan, S N Patek","doi":"10.1093/iob/obad019","DOIUrl":null,"url":null,"abstract":"<p><p>Across countless marine invertebrates, coordination of closely spaced swimming appendages is key to producing diverse locomotory behaviors. Using a widespread mechanism termed hybrid metachronal propulsion, mantis shrimp swim by moving five paddle-like pleopods along their abdomen in a posterior to anterior sequence during the power stroke and a near-synchronous motion during the recovery stroke. Despite the ubiquity of this mechanism, it is not clear how hybrid metachronal swimmers coordinate and modify individual appendage movements to achieve a range of swimming capabilities. Using high-speed imaging, we measured pleopod kinematics of mantis shrimp (<i>Neogonodactylus bredini</i>), while they performed two swimming behaviors: burst swimming and taking off from the substrate. By tracking each of the five pleopods, we tested how stroke kinematics vary across swimming speeds and the two swimming behaviors. We found that mantis shrimp achieve faster swimming speeds through a combination of higher beat frequencies, smaller stroke durations, and partially via larger stroke angles. The five pleopods exhibit non-uniform kinematics that contribute to the coordination and forward propulsion of the whole system. Micro-hook structures (retinacula) connect each of the five pleopod pairs and differ in their attachment across pleopods-possibly contributing to passive kinematic control. We compare our findings in <i>N. bredini</i> to previous studies to identify commonalities across hybrid metachronal swimmers at high Reynolds numbers and centimeter scales. Through our large experimental dataset and by tracking each pleopod's movements, our study reveals key parameters by which mantis shrimp adjust and control their swimming, yielding diverse locomotor abilities.</p>","PeriodicalId":73396,"journal":{"name":"","volume":"5 1","pages":"obad019"},"PeriodicalIF":0.0,"publicationDate":"2023-06-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10303694/pdf/","citationCount":"0","resultStr":"{\"title\":\"Mantis Shrimp Locomotion: Coordination and Variation of Hybrid Metachronal Swimming.\",\"authors\":\"S E Hanson, W J Ray, A Santhanakrishnan, S N Patek\",\"doi\":\"10.1093/iob/obad019\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Across countless marine invertebrates, coordination of closely spaced swimming appendages is key to producing diverse locomotory behaviors. Using a widespread mechanism termed hybrid metachronal propulsion, mantis shrimp swim by moving five paddle-like pleopods along their abdomen in a posterior to anterior sequence during the power stroke and a near-synchronous motion during the recovery stroke. Despite the ubiquity of this mechanism, it is not clear how hybrid metachronal swimmers coordinate and modify individual appendage movements to achieve a range of swimming capabilities. Using high-speed imaging, we measured pleopod kinematics of mantis shrimp (<i>Neogonodactylus bredini</i>), while they performed two swimming behaviors: burst swimming and taking off from the substrate. By tracking each of the five pleopods, we tested how stroke kinematics vary across swimming speeds and the two swimming behaviors. We found that mantis shrimp achieve faster swimming speeds through a combination of higher beat frequencies, smaller stroke durations, and partially via larger stroke angles. The five pleopods exhibit non-uniform kinematics that contribute to the coordination and forward propulsion of the whole system. Micro-hook structures (retinacula) connect each of the five pleopod pairs and differ in their attachment across pleopods-possibly contributing to passive kinematic control. We compare our findings in <i>N. bredini</i> to previous studies to identify commonalities across hybrid metachronal swimmers at high Reynolds numbers and centimeter scales. Through our large experimental dataset and by tracking each pleopod's movements, our study reveals key parameters by which mantis shrimp adjust and control their swimming, yielding diverse locomotor abilities.</p>\",\"PeriodicalId\":73396,\"journal\":{\"name\":\"\",\"volume\":\"5 1\",\"pages\":\"obad019\"},\"PeriodicalIF\":0.0,\"publicationDate\":\"2023-06-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10303694/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"\",\"FirstCategoryId\":\"99\",\"ListUrlMain\":\"https://doi.org/10.1093/iob/obad019\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"","FirstCategoryId":"99","ListUrlMain":"https://doi.org/10.1093/iob/obad019","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/1 0:00:00","PubModel":"eCollection","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
摘要
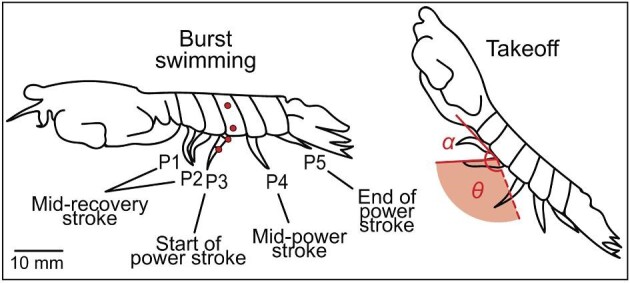
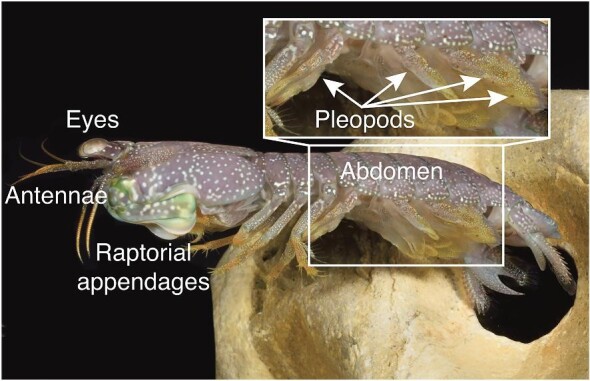
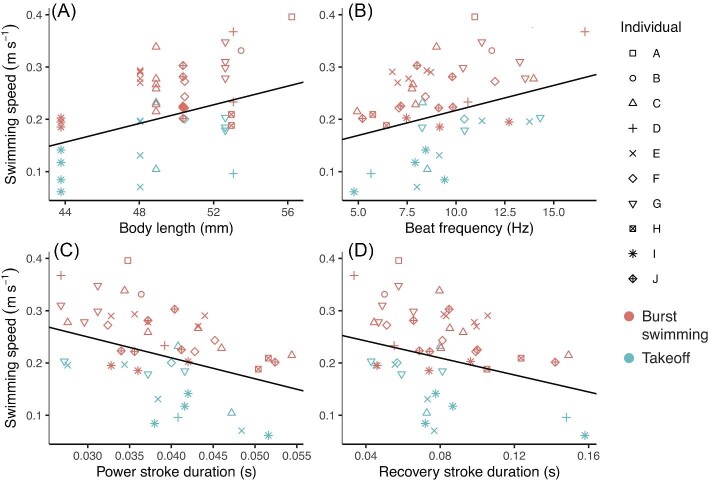
在无数海洋无脊椎动物中,相距很近的游泳附肢的协调是产生各种运动行为的关键。螳螂虾广泛使用一种被称为 "混合节肢推进 "的机制,在动力划水过程中,沿着腹部移动五个桨状褶足,顺序为后向前,而在恢复划水过程中,则是近乎同步的运动。尽管这种机制无处不在,但目前还不清楚杂交变节游泳者是如何协调和修改单个附肢运动以实现一系列游泳能力的。利用高速成像技术,我们测量了螳螂虾(Neogonodactylus bredini)的褶足运动学,当时它们进行了两种游泳行为:突游和从基质上起飞。通过跟踪五只褶足,我们测试了不同游泳速度和两种游泳行为下的划水运动学变化。我们发现,螳螂虾通过较高的节拍频率、较短的划水持续时间,以及部分通过较大的划水角度来实现较快的游泳速度。五个褶足表现出不均匀的运动学特性,有助于整个系统的协调和向前推进。微型钩状结构(retinacula)连接着五对褶足,不同褶足的钩状结构不同,可能有助于被动运动控制。我们将对 N. bredini 的研究结果与之前的研究结果进行了比较,以确定在高雷诺数和厘米尺度下杂交元游泳者的共性。通过我们的大型实验数据集和跟踪每个褶足的运动,我们的研究揭示了螳螂虾调整和控制其游泳的关键参数,从而产生了不同的运动能力。
Mantis Shrimp Locomotion: Coordination and Variation of Hybrid Metachronal Swimming.
Across countless marine invertebrates, coordination of closely spaced swimming appendages is key to producing diverse locomotory behaviors. Using a widespread mechanism termed hybrid metachronal propulsion, mantis shrimp swim by moving five paddle-like pleopods along their abdomen in a posterior to anterior sequence during the power stroke and a near-synchronous motion during the recovery stroke. Despite the ubiquity of this mechanism, it is not clear how hybrid metachronal swimmers coordinate and modify individual appendage movements to achieve a range of swimming capabilities. Using high-speed imaging, we measured pleopod kinematics of mantis shrimp (Neogonodactylus bredini), while they performed two swimming behaviors: burst swimming and taking off from the substrate. By tracking each of the five pleopods, we tested how stroke kinematics vary across swimming speeds and the two swimming behaviors. We found that mantis shrimp achieve faster swimming speeds through a combination of higher beat frequencies, smaller stroke durations, and partially via larger stroke angles. The five pleopods exhibit non-uniform kinematics that contribute to the coordination and forward propulsion of the whole system. Micro-hook structures (retinacula) connect each of the five pleopod pairs and differ in their attachment across pleopods-possibly contributing to passive kinematic control. We compare our findings in N. bredini to previous studies to identify commonalities across hybrid metachronal swimmers at high Reynolds numbers and centimeter scales. Through our large experimental dataset and by tracking each pleopod's movements, our study reveals key parameters by which mantis shrimp adjust and control their swimming, yielding diverse locomotor abilities.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
