Humphrey Yang, Dinesh K. Patel, Tate Johnson, Ke Zhong, Gina Olson, Carmel Majidi, Mohammad F. Islam, Teng Zhang, Lining Yao
{"title":"A compliant metastructure design with reconfigurability up to six degrees of freedom","authors":"Humphrey Yang, Dinesh K. Patel, Tate Johnson, Ke Zhong, Gina Olson, Carmel Majidi, Mohammad F. Islam, Teng Zhang, Lining Yao","doi":"10.1038/s41467-024-55591-2","DOIUrl":null,"url":null,"abstract":"<p>Compliant mechanisms with reconfigurable degrees of freedom are gaining attention in the development of kinesthetic haptic devices, robotic systems, and mechanical metamaterials. However, available devices exhibit limited programmability and form-customizability, restricting their versatility. To address this gap, we propose a metastructure concept featuring reconfigurable motional freedom and tunable stiffness, adaptable to various form factors and applications. These devices incorporate passive flexures and actively stiffness-changing rods to modify kinematic freedom. A rational design pipeline informs the flexures’ topological arrangements, geometric parameters, and control signals based on targeted mobilities, enabling the creation of unitary joints with up to six degrees of freedom. Our demonstrative application examples include a wrist device that has an effective stiffness of 0.370 Nm/deg (unlocked state, 5% displacement) to 2.278 Nm/deg (locked state, 1% displacement) to enable dynamic joint mobility control, a haptic thimble device (2.27-52.815 Nmm<sup>−1</sup> at 1% displacement) that mimics the sensation of touching physical materials ranging from soft gel to metal surfaces, and a wearable device composed of multiple joints tailored for the arm and hand to augment haptic experiences or facilitate muscle training. We believe the presented method can help democratize compliant metastructures development and expand their versatility for broader contexts.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"94 1","pages":""},"PeriodicalIF":15.7000,"publicationDate":"2025-01-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-024-55591-2","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
引用次数: 0
Abstract
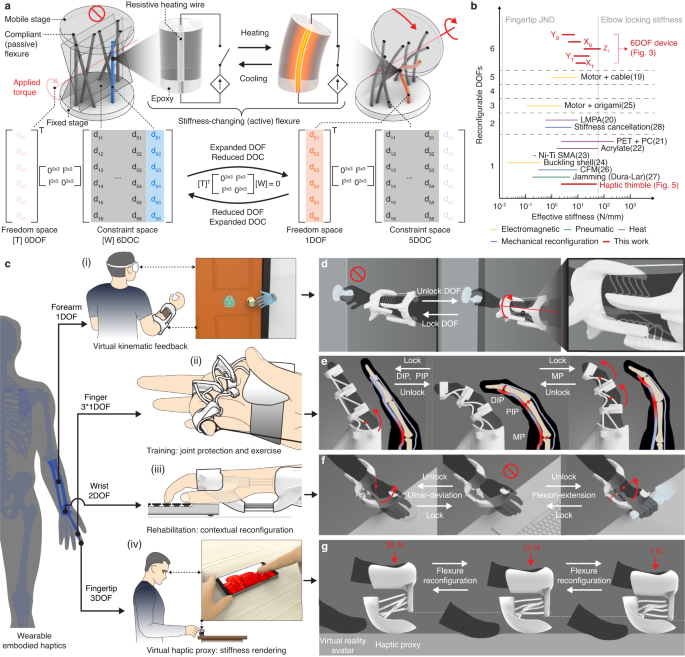
Compliant mechanisms with reconfigurable degrees of freedom are gaining attention in the development of kinesthetic haptic devices, robotic systems, and mechanical metamaterials. However, available devices exhibit limited programmability and form-customizability, restricting their versatility. To address this gap, we propose a metastructure concept featuring reconfigurable motional freedom and tunable stiffness, adaptable to various form factors and applications. These devices incorporate passive flexures and actively stiffness-changing rods to modify kinematic freedom. A rational design pipeline informs the flexures’ topological arrangements, geometric parameters, and control signals based on targeted mobilities, enabling the creation of unitary joints with up to six degrees of freedom. Our demonstrative application examples include a wrist device that has an effective stiffness of 0.370 Nm/deg (unlocked state, 5% displacement) to 2.278 Nm/deg (locked state, 1% displacement) to enable dynamic joint mobility control, a haptic thimble device (2.27-52.815 Nmm−1 at 1% displacement) that mimics the sensation of touching physical materials ranging from soft gel to metal surfaces, and a wearable device composed of multiple joints tailored for the arm and hand to augment haptic experiences or facilitate muscle training. We believe the presented method can help democratize compliant metastructures development and expand their versatility for broader contexts.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
