Thomas A. Berrueta, Allison Pinosky, Todd D. Murphey
{"title":"最大扩散强化学习","authors":"Thomas A. Berrueta, Allison Pinosky, Todd D. Murphey","doi":"10.1038/s42256-024-00829-3","DOIUrl":null,"url":null,"abstract":"Robots and animals both experience the world through their bodies and senses. Their embodiment constrains their experiences, ensuring that they unfold continuously in space and time. As a result, the experiences of embodied agents are intrinsically correlated. Correlations create fundamental challenges for machine learning, as most techniques rely on the assumption that data are independent and identically distributed. In reinforcement learning, where data are directly collected from an agent’s sequential experiences, violations of this assumption are often unavoidable. Here we derive a method that overcomes this issue by exploiting the statistical mechanics of ergodic processes, which we term maximum diffusion reinforcement learning. By decorrelating agent experiences, our approach provably enables single-shot learning in continuous deployments over the course of individual task attempts. Moreover, we prove our approach generalizes well-known maximum entropy techniques and robustly exceeds state-of-the-art performance across popular benchmarks. Our results at the nexus of physics, learning and control form a foundation for transparent and reliable decision-making in embodied reinforcement learning agents. The central assumption in machine learning that data are independent and identically distributed does not hold in many reinforcement learning settings, as experiences of reinforcement learning agents are sequential and intrinsically correlated in time. Berrueta and colleagues use the mathematical theory of ergodic processes to develop a reinforcement framework that can decorrelate agent experiences and is capable of learning in single-shot deployments.","PeriodicalId":48533,"journal":{"name":"Nature Machine Intelligence","volume":"6 5","pages":"504-514"},"PeriodicalIF":29.8000,"publicationDate":"2024-05-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Maximum diffusion reinforcement learning\",\"authors\":\"Thomas A. Berrueta, Allison Pinosky, Todd D. Murphey\",\"doi\":\"10.1038/s42256-024-00829-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Robots and animals both experience the world through their bodies and senses. Their embodiment constrains their experiences, ensuring that they unfold continuously in space and time. As a result, the experiences of embodied agents are intrinsically correlated. Correlations create fundamental challenges for machine learning, as most techniques rely on the assumption that data are independent and identically distributed. In reinforcement learning, where data are directly collected from an agent’s sequential experiences, violations of this assumption are often unavoidable. Here we derive a method that overcomes this issue by exploiting the statistical mechanics of ergodic processes, which we term maximum diffusion reinforcement learning. By decorrelating agent experiences, our approach provably enables single-shot learning in continuous deployments over the course of individual task attempts. Moreover, we prove our approach generalizes well-known maximum entropy techniques and robustly exceeds state-of-the-art performance across popular benchmarks. Our results at the nexus of physics, learning and control form a foundation for transparent and reliable decision-making in embodied reinforcement learning agents. The central assumption in machine learning that data are independent and identically distributed does not hold in many reinforcement learning settings, as experiences of reinforcement learning agents are sequential and intrinsically correlated in time. Berrueta and colleagues use the mathematical theory of ergodic processes to develop a reinforcement framework that can decorrelate agent experiences and is capable of learning in single-shot deployments.\",\"PeriodicalId\":48533,\"journal\":{\"name\":\"Nature Machine Intelligence\",\"volume\":\"6 5\",\"pages\":\"504-514\"},\"PeriodicalIF\":29.8000,\"publicationDate\":\"2024-05-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Machine Intelligence\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.nature.com/articles/s42256-024-00829-3\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Machine Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.nature.com/articles/s42256-024-00829-3","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
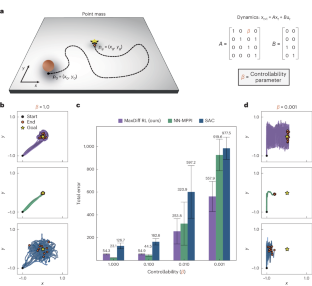
Robots and animals both experience the world through their bodies and senses. Their embodiment constrains their experiences, ensuring that they unfold continuously in space and time. As a result, the experiences of embodied agents are intrinsically correlated. Correlations create fundamental challenges for machine learning, as most techniques rely on the assumption that data are independent and identically distributed. In reinforcement learning, where data are directly collected from an agent’s sequential experiences, violations of this assumption are often unavoidable. Here we derive a method that overcomes this issue by exploiting the statistical mechanics of ergodic processes, which we term maximum diffusion reinforcement learning. By decorrelating agent experiences, our approach provably enables single-shot learning in continuous deployments over the course of individual task attempts. Moreover, we prove our approach generalizes well-known maximum entropy techniques and robustly exceeds state-of-the-art performance across popular benchmarks. Our results at the nexus of physics, learning and control form a foundation for transparent and reliable decision-making in embodied reinforcement learning agents. The central assumption in machine learning that data are independent and identically distributed does not hold in many reinforcement learning settings, as experiences of reinforcement learning agents are sequential and intrinsically correlated in time. Berrueta and colleagues use the mathematical theory of ergodic processes to develop a reinforcement framework that can decorrelate agent experiences and is capable of learning in single-shot deployments.
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
