{"title":"机器人移动加工设备 FRF 预测的两阶段动态模型更新方法","authors":"Zijian Ma , Fugui Xie , Xin-Jun Liu","doi":"10.1016/j.rcim.2024.102895","DOIUrl":null,"url":null,"abstract":"<div><div>In the coming decades, robotized mobile machining equipment (RMME) is possible to evolve as a new branch of machine tools due to its exceptional flexibility. The frequency response function (FRF) serves as a theoretical foundation in controlling the vibration deformations that significantly limit the material removal efficiency of RMME. Model updating, aimed at minimizing errors between the theoretical model and the physical prototype, is essential to predict the FRF accurately. However, updating the dynamic model of RMME, characterized by non-mechanical boundary conditions, complex lightweight components, and low-stiffness structures, presents difficulties in computational efficiency and updating posture-dependent parameters. To solve these issues, the prediction error generation mechanism is first analyzed to confirm the error types that need to be eliminated in model updating. A two-stage model updating method that can separately update the robot structure and boundary-related parameters is proposed to rapidly update the dynamic model under various machining tasks. The interface reduction technique that can decrease the model order is introduced to reduce the computational consumption, and an approach to fast update such interface reduction substructures is put forward to avoid the reiterative model reduction during updating. An updating method for posture-dependent parameters based on multi-objective optimization is designed to control the multiple solution issues by generating many feasible solutions, ensuring the prediction effects for non-updated postures. The experimental results indicate that updating structural parameters in stage I and adsorption surface parameters in stage II results in mean error reduction percentages of 58.79 % and 48.30 %, respectively. Additionally, the natural frequencies and the mode shapes can also be predicted by the updated model. Comparative analysis with various controlled groups confirms the advantages of utilizing posture-dependent parameters in prediction accuracy and adopting the two-stage model updating method in efficiency. The proposed method can also be applied to other RMMEs.</div></div>","PeriodicalId":21452,"journal":{"name":"Robotics and Computer-integrated Manufacturing","volume":"92 ","pages":"Article 102895"},"PeriodicalIF":11.4000,"publicationDate":"2025-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A two-stage dynamic model updating method for the FRF prediction of the robotized mobile machining equipment\",\"authors\":\"Zijian Ma , Fugui Xie , Xin-Jun Liu\",\"doi\":\"10.1016/j.rcim.2024.102895\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>In the coming decades, robotized mobile machining equipment (RMME) is possible to evolve as a new branch of machine tools due to its exceptional flexibility. The frequency response function (FRF) serves as a theoretical foundation in controlling the vibration deformations that significantly limit the material removal efficiency of RMME. Model updating, aimed at minimizing errors between the theoretical model and the physical prototype, is essential to predict the FRF accurately. However, updating the dynamic model of RMME, characterized by non-mechanical boundary conditions, complex lightweight components, and low-stiffness structures, presents difficulties in computational efficiency and updating posture-dependent parameters. To solve these issues, the prediction error generation mechanism is first analyzed to confirm the error types that need to be eliminated in model updating. A two-stage model updating method that can separately update the robot structure and boundary-related parameters is proposed to rapidly update the dynamic model under various machining tasks. The interface reduction technique that can decrease the model order is introduced to reduce the computational consumption, and an approach to fast update such interface reduction substructures is put forward to avoid the reiterative model reduction during updating. An updating method for posture-dependent parameters based on multi-objective optimization is designed to control the multiple solution issues by generating many feasible solutions, ensuring the prediction effects for non-updated postures. The experimental results indicate that updating structural parameters in stage I and adsorption surface parameters in stage II results in mean error reduction percentages of 58.79 % and 48.30 %, respectively. Additionally, the natural frequencies and the mode shapes can also be predicted by the updated model. Comparative analysis with various controlled groups confirms the advantages of utilizing posture-dependent parameters in prediction accuracy and adopting the two-stage model updating method in efficiency. The proposed method can also be applied to other RMMEs.</div></div>\",\"PeriodicalId\":21452,\"journal\":{\"name\":\"Robotics and Computer-integrated Manufacturing\",\"volume\":\"92 \",\"pages\":\"Article 102895\"},\"PeriodicalIF\":11.4000,\"publicationDate\":\"2025-04-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Robotics and Computer-integrated Manufacturing\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0736584524001820\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/11/6 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and Computer-integrated Manufacturing","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0736584524001820","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/6 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
A two-stage dynamic model updating method for the FRF prediction of the robotized mobile machining equipment
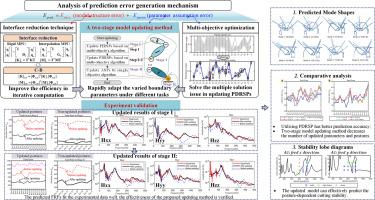
In the coming decades, robotized mobile machining equipment (RMME) is possible to evolve as a new branch of machine tools due to its exceptional flexibility. The frequency response function (FRF) serves as a theoretical foundation in controlling the vibration deformations that significantly limit the material removal efficiency of RMME. Model updating, aimed at minimizing errors between the theoretical model and the physical prototype, is essential to predict the FRF accurately. However, updating the dynamic model of RMME, characterized by non-mechanical boundary conditions, complex lightweight components, and low-stiffness structures, presents difficulties in computational efficiency and updating posture-dependent parameters. To solve these issues, the prediction error generation mechanism is first analyzed to confirm the error types that need to be eliminated in model updating. A two-stage model updating method that can separately update the robot structure and boundary-related parameters is proposed to rapidly update the dynamic model under various machining tasks. The interface reduction technique that can decrease the model order is introduced to reduce the computational consumption, and an approach to fast update such interface reduction substructures is put forward to avoid the reiterative model reduction during updating. An updating method for posture-dependent parameters based on multi-objective optimization is designed to control the multiple solution issues by generating many feasible solutions, ensuring the prediction effects for non-updated postures. The experimental results indicate that updating structural parameters in stage I and adsorption surface parameters in stage II results in mean error reduction percentages of 58.79 % and 48.30 %, respectively. Additionally, the natural frequencies and the mode shapes can also be predicted by the updated model. Comparative analysis with various controlled groups confirms the advantages of utilizing posture-dependent parameters in prediction accuracy and adopting the two-stage model updating method in efficiency. The proposed method can also be applied to other RMMEs.
期刊介绍:
The journal, Robotics and Computer-Integrated Manufacturing, focuses on sharing research applications that contribute to the development of new or enhanced robotics, manufacturing technologies, and innovative manufacturing strategies that are relevant to industry. Papers that combine theory and experimental validation are preferred, while review papers on current robotics and manufacturing issues are also considered. However, papers on traditional machining processes, modeling and simulation, supply chain management, and resource optimization are generally not within the scope of the journal, as there are more appropriate journals for these topics. Similarly, papers that are overly theoretical or mathematical will be directed to other suitable journals. The journal welcomes original papers in areas such as industrial robotics, human-robot collaboration in manufacturing, cloud-based manufacturing, cyber-physical production systems, big data analytics in manufacturing, smart mechatronics, machine learning, adaptive and sustainable manufacturing, and other fields involving unique manufacturing technologies.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
