Xiaohui Fang , Qinghua Song , Jing Qin , Zhenyang Li , Haifeng Ma , Zhanqiang Liu
{"title":"A dual knowledge embedded hybrid model based on augmented data and improved loss function for tool wear monitoring","authors":"Xiaohui Fang , Qinghua Song , Jing Qin , Zhenyang Li , Haifeng Ma , Zhanqiang Liu","doi":"10.1016/j.rcim.2024.102901","DOIUrl":null,"url":null,"abstract":"<div><div>Tool wear monitoring (TWM) is essential for enhancing the machining accuracy of intelligent manufacturing systems and ensuring the consistency and reliability of products. The complex and dynamic processing environment demands higher real-time monitoring and generalization ability of TWM. Traditional data-driven models lack guided training in physical processes and are limited by the amount of samples with wear labels. To guide the model to capture the underlying physical mechanism and enhance compliance with the law of tool wear, a dual knowledge embedded hybrid model based on augmented data and improved loss function for TWM is proposed in this paper. The second training data source is obtained by constructing the mapping relationship between cutting force and tool wear, which effectively complements and enhances the physical characteristics between the data and addresses the issue of insufficient labeled data in actual network training. Subsequently, a structure integrating serial convolution, parallel convolution, bidirectional gated recurrent unit (BiGRU) and attention mechanism is developed to extract the spatial and temporal features in time series data. Moreover, Based on the physical law of tool wear, an improved loss function with physical constraints is proposed to improve the physical consistency of the model. The experimental results show that the model prediction RMSE error is reduced by 12.67% after augmented data compared to a single data source, and the RMSE error of the prediction result is reduced by 25.16% at most after the improvement of the loss function. The model has high prediction accuracy within short training epochs and good real-time performance. The proposed approach provides a modeling strategy with low computational resource requirements based on the fusion of physical and data information.</div></div>","PeriodicalId":21452,"journal":{"name":"Robotics and Computer-integrated Manufacturing","volume":"92 ","pages":"Article 102901"},"PeriodicalIF":11.4000,"publicationDate":"2025-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and Computer-integrated Manufacturing","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0736584524001881","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/15 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
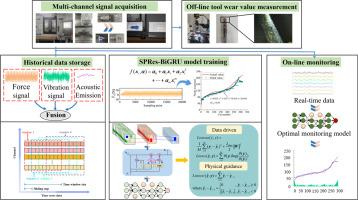
Tool wear monitoring (TWM) is essential for enhancing the machining accuracy of intelligent manufacturing systems and ensuring the consistency and reliability of products. The complex and dynamic processing environment demands higher real-time monitoring and generalization ability of TWM. Traditional data-driven models lack guided training in physical processes and are limited by the amount of samples with wear labels. To guide the model to capture the underlying physical mechanism and enhance compliance with the law of tool wear, a dual knowledge embedded hybrid model based on augmented data and improved loss function for TWM is proposed in this paper. The second training data source is obtained by constructing the mapping relationship between cutting force and tool wear, which effectively complements and enhances the physical characteristics between the data and addresses the issue of insufficient labeled data in actual network training. Subsequently, a structure integrating serial convolution, parallel convolution, bidirectional gated recurrent unit (BiGRU) and attention mechanism is developed to extract the spatial and temporal features in time series data. Moreover, Based on the physical law of tool wear, an improved loss function with physical constraints is proposed to improve the physical consistency of the model. The experimental results show that the model prediction RMSE error is reduced by 12.67% after augmented data compared to a single data source, and the RMSE error of the prediction result is reduced by 25.16% at most after the improvement of the loss function. The model has high prediction accuracy within short training epochs and good real-time performance. The proposed approach provides a modeling strategy with low computational resource requirements based on the fusion of physical and data information.
期刊介绍:
The journal, Robotics and Computer-Integrated Manufacturing, focuses on sharing research applications that contribute to the development of new or enhanced robotics, manufacturing technologies, and innovative manufacturing strategies that are relevant to industry. Papers that combine theory and experimental validation are preferred, while review papers on current robotics and manufacturing issues are also considered. However, papers on traditional machining processes, modeling and simulation, supply chain management, and resource optimization are generally not within the scope of the journal, as there are more appropriate journals for these topics. Similarly, papers that are overly theoretical or mathematical will be directed to other suitable journals. The journal welcomes original papers in areas such as industrial robotics, human-robot collaboration in manufacturing, cloud-based manufacturing, cyber-physical production systems, big data analytics in manufacturing, smart mechatronics, machine learning, adaptive and sustainable manufacturing, and other fields involving unique manufacturing technologies.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
